


Worum geht’s?
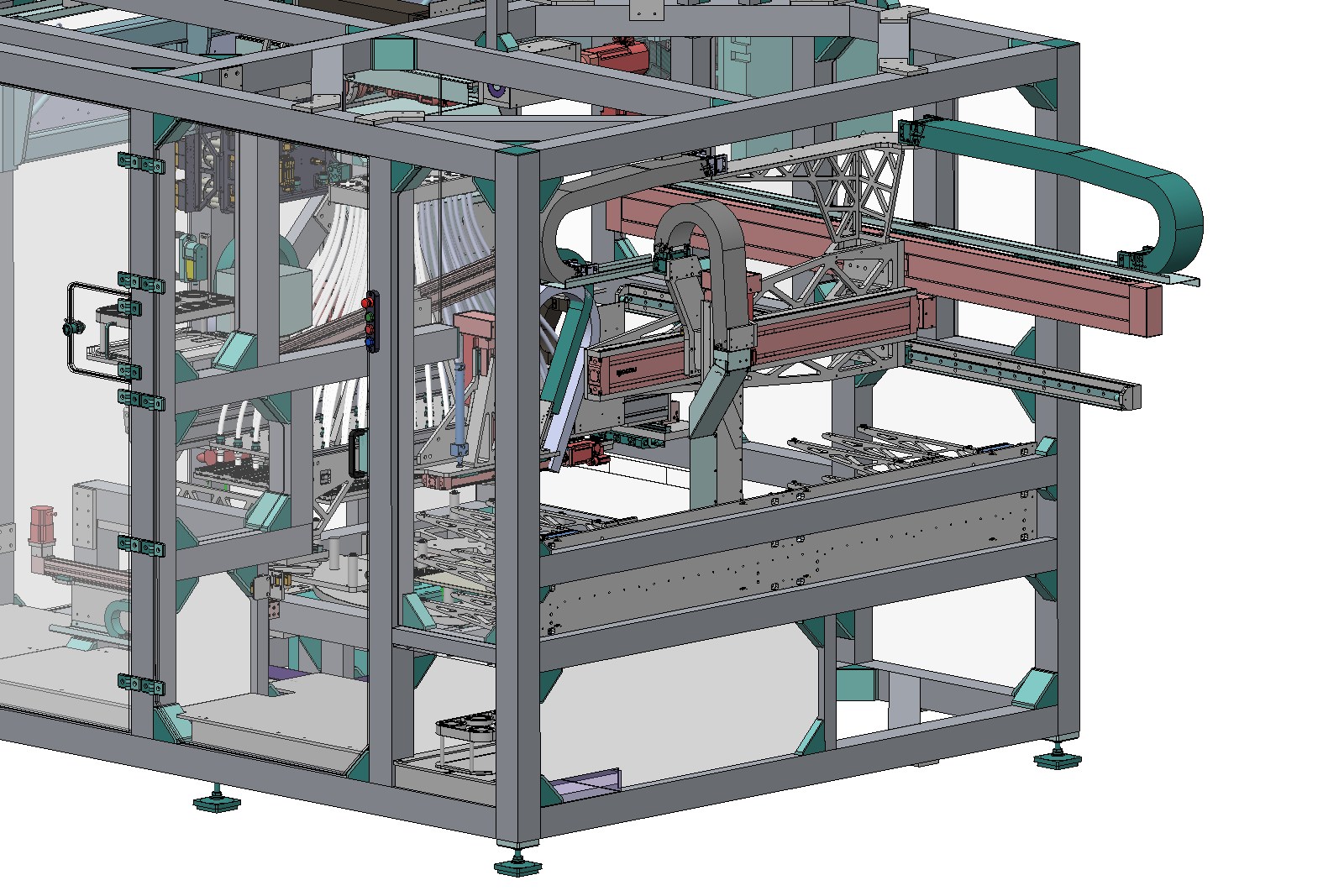
In KW 1 2023 wurde entschieden, die bereits integrierte Robotiklösung im Abfüllmodul wieder zu ersetzen und eine neue Handhabungslösung zu entwickeln. Der verfügbare Bauraum war zu diesem Zeitpunkt bereits vollständig definiert, sodass die neue Lösung mit denselben Platzverhältnissen zurechtkommen musste. Neben mehreren anderen Konzepten – darunter auch ein Scara-Ansatz – konnte sich schliesslich meine Idee eines Auslegerportals durchsetzen.
Die Umsetzung erfolgte in sehr kurzer Zeit: Bereits in KW 7 war die Konstruktion vollständig detailliert, gedruckt und an die Beschaffung übergeben. Die interne Fertigung startete in KW 8, in KW 11 wurde das Portal in das Abfüllmodul eingebaut und in KW 13 liefen bereits die ersten angeschlossenen und teilweise programmierten Tests.
Was war die Herausforderung?
- Neue Lösung im bereits festgelegten Bauraum des Abfüllmoduls
- Hohe Zugänglichkeit trotz grossen Verfahrwegen
- Ausreichende Steifigkeit bei möglichst geringem Gewicht
- Saubere Kabelführung auf engem Raum
- Zuverlässige Handhabung unter Serienbedingungen
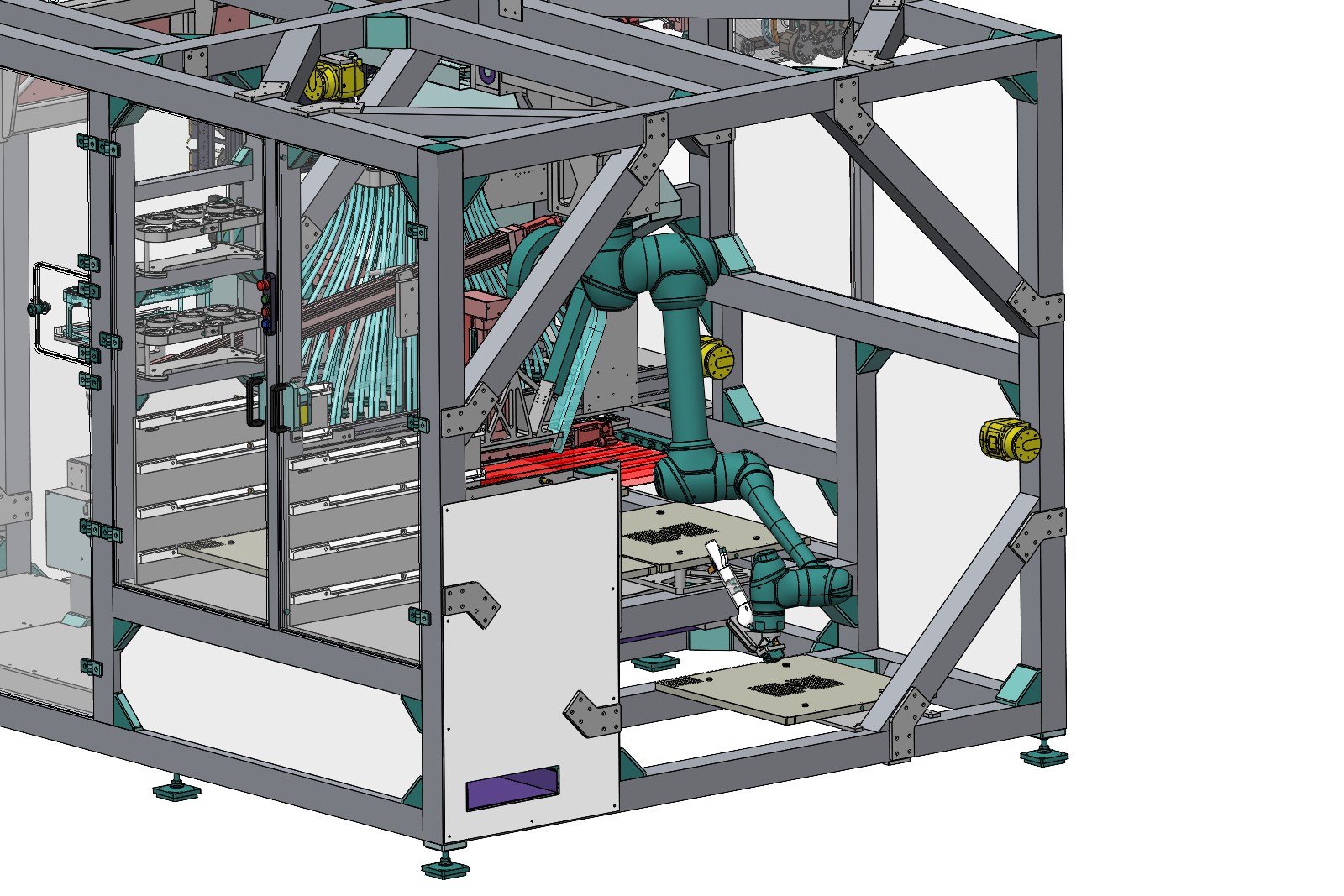
Der zuvor eingesetzte 6-Achs-Roboter war bereits mechanisch integriert, programmiert und konnte Spitzennester in das nachfolgende Prüfmodul einsetzen. Im Dauerlauf verlor der Roboter jedoch immer wieder seine Position. Die Ursache liess sich nicht eindeutig finden. Gleichzeitig war auch die Integration und Kommunikation mit der übergeordneten Steuerung anspruchsvoll. Unter dem gegebenen Terminrahmen war deshalb klar, dass eine robustere und direkter beherrschbare Lösung benötigt wurde.
Wie wurde das gelöst?
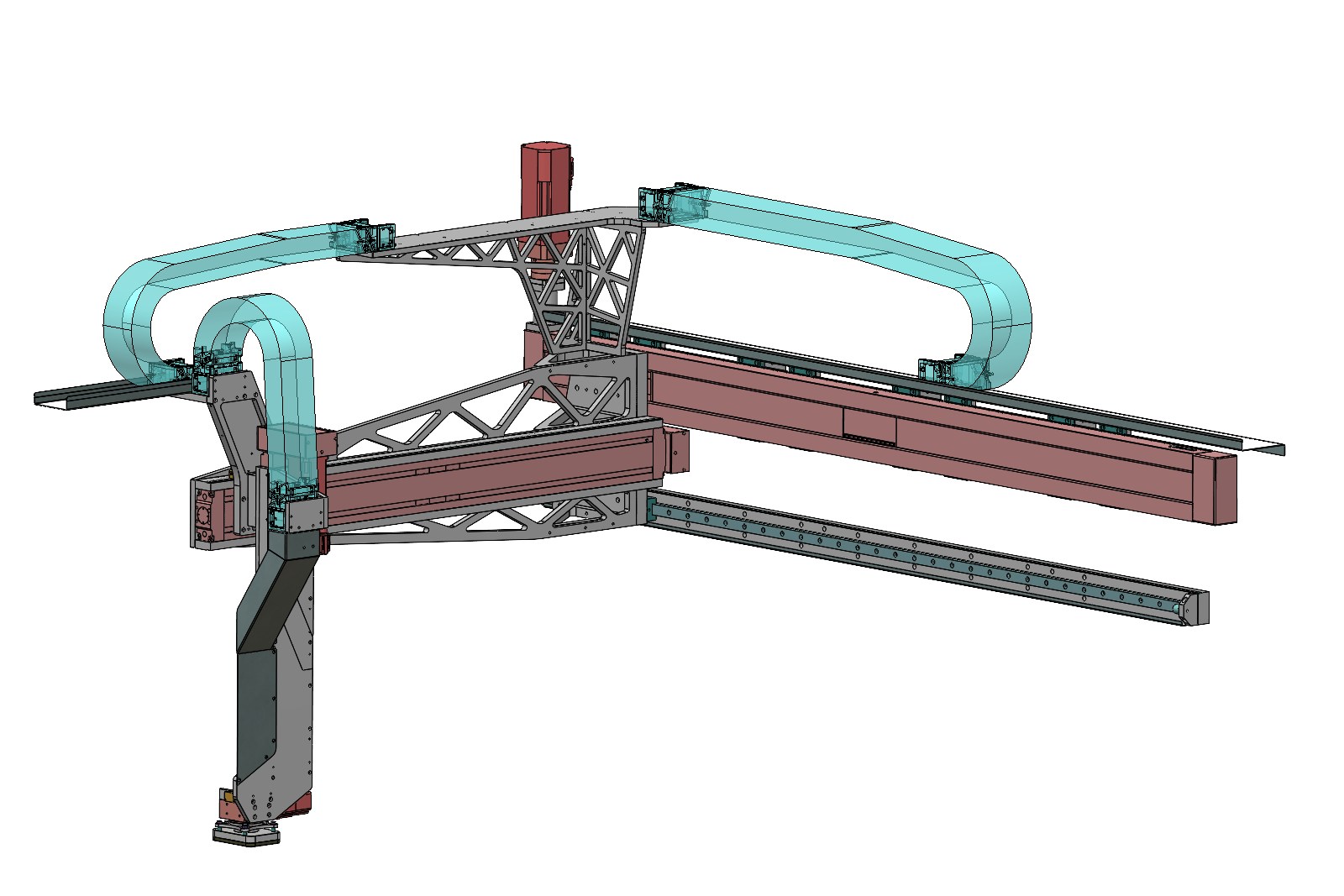
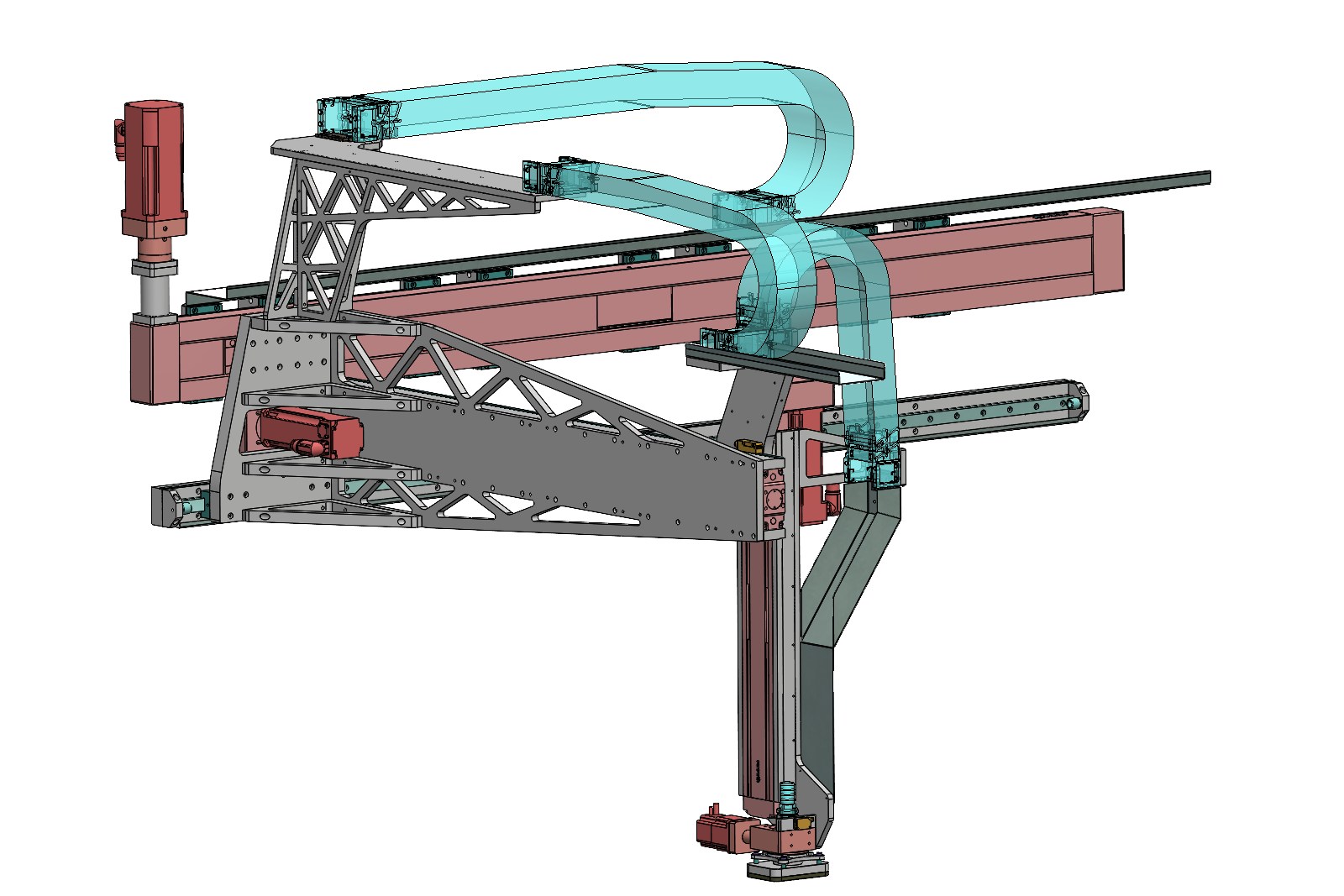
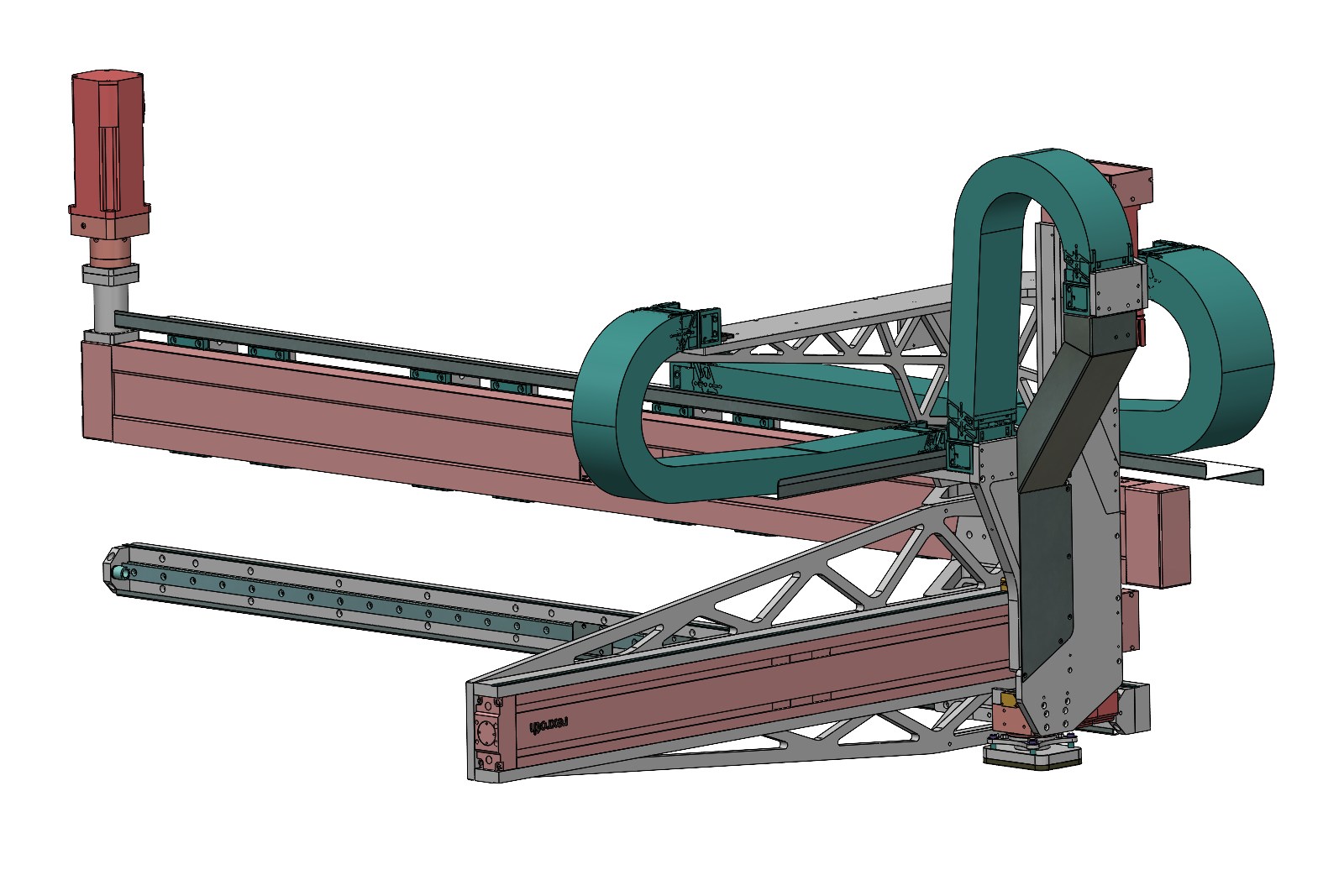
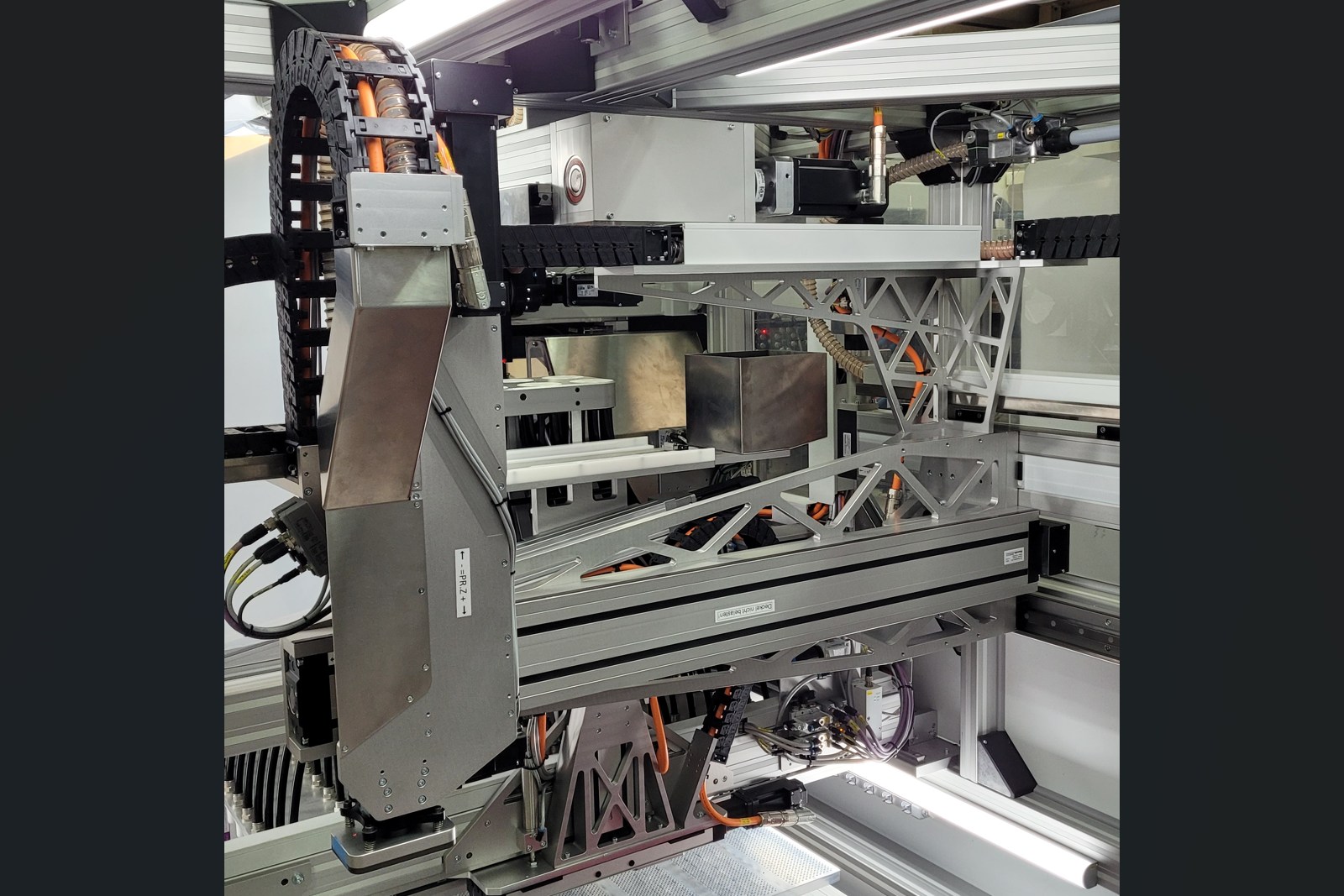
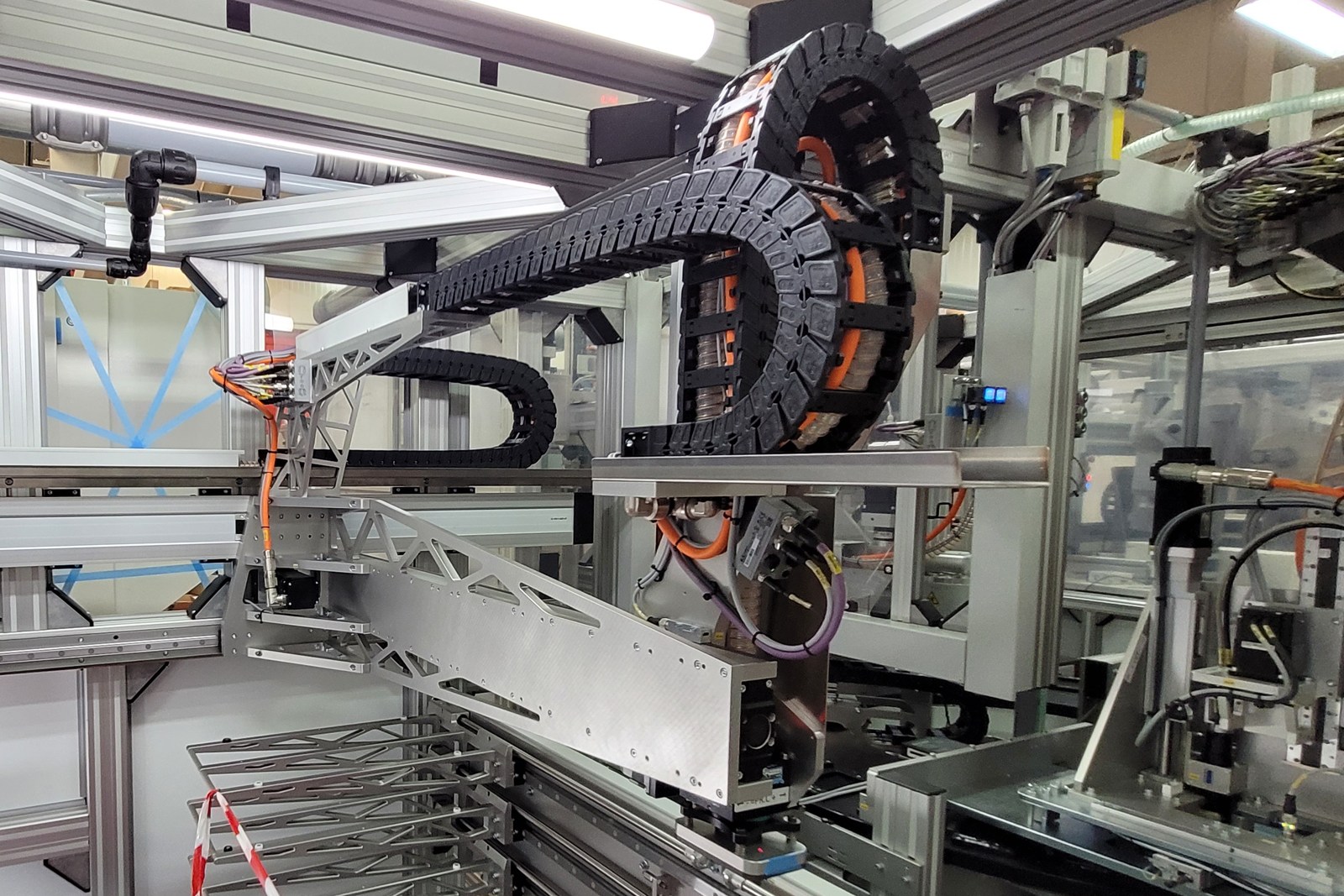
Das neue Konzept basiert auf einer langen X-Zahnriemenachse, einer zusätzlichen parallelen Führung zur Abstützung des Auslegers sowie je einer Spindelachse für Y- und Z-Bewegung. Durch diese Auslegerbauweise konnte auf eine zweite Abstützung im Arbeitsbereich verzichtet werden. Dadurch blieb der Bereich von vorne sehr gut zugänglich – ein zentraler Vorteil gegenüber früheren Konzepten.
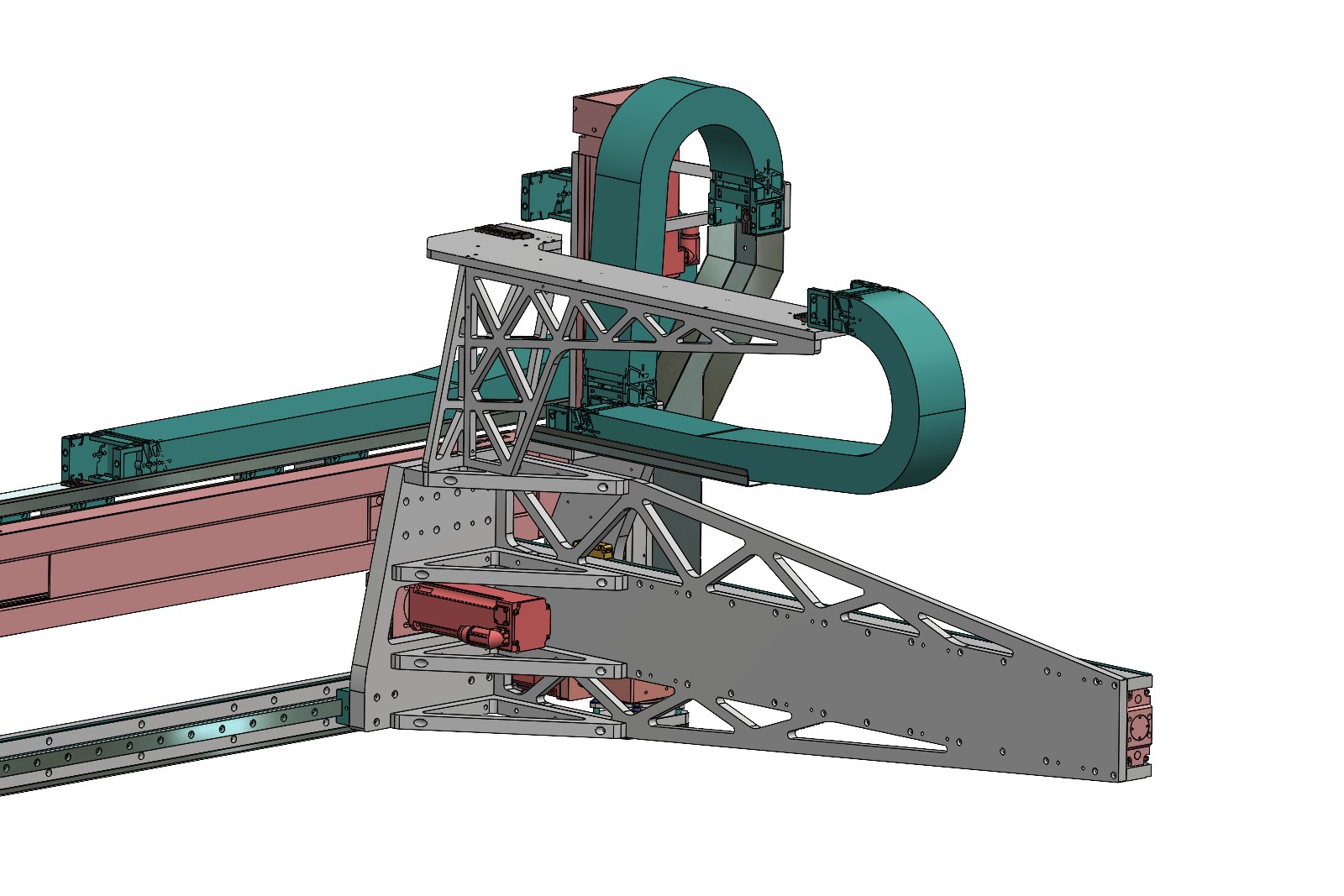
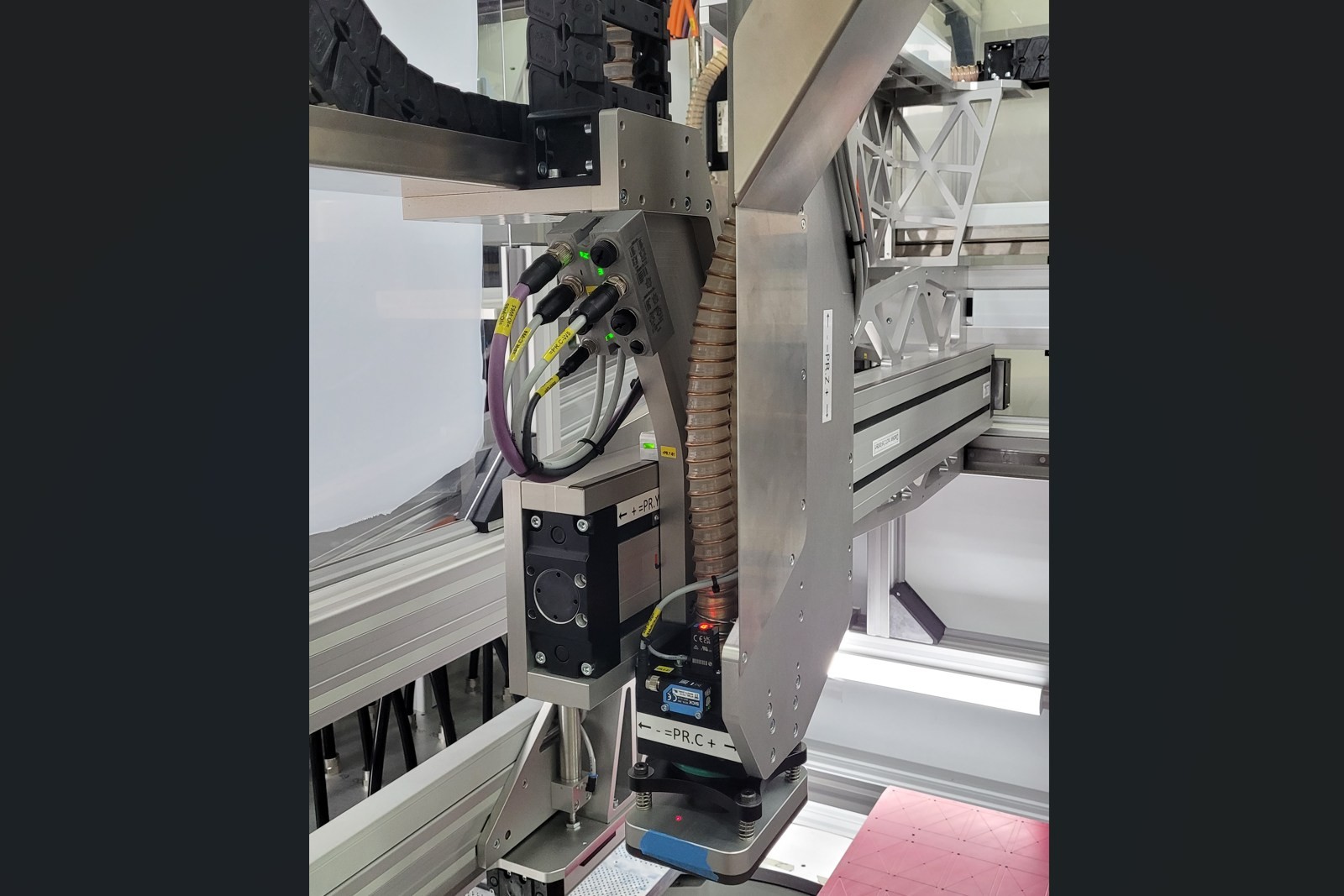
Eine besondere Herausforderung war die Kombination aus hoher Steifigkeit und geringer bewegter Masse. Die Achsen und die Tragstruktur wurden deshalb gezielt verstärkt, gleichzeitig aber so leicht wie möglich konstruiert. Auch alle Achsen erhielten eine Wegmessung. Für spätere Folgeanlagen wurde die Y-Achse mit einer grösseren Spindelsteigung ausgelegt, um die Dynamik weiter zu erhöhen.
Auch die Kabelführung war konstruktiv anspruchsvoll, da sich alle Achsen auf engem Raum bewegen und gleichzeitig gut wartbar bleiben mussten. Das fertige Portal übernimmt die Handhabungsaufgaben nun kompakter, zugänglicher und deutlich robuster als die zuvor verfolgte Robotiklösung.
Key Facts
- Entwicklung einer neuen Handhabungslösung im bestehenden Bauraum
- Auslegerportal als Ersatz für die zuvor integrierte Robotiklösung
- Konstruktion, Detailierung und Übergabe in nur wenigen Wochen
- X-Zahnriemenachse mit zusätzlicher paralleler Abstützführung
- Spindelachsen für Y- und Z-Bewegung
- Wegmessung auf allen Achsen
- Sehr gute Zugänglichkeit durch Auslegerbauweise
- Leichtbau bei gleichzeitig hoher Steifigkeit
- Optimierte Y-Achse für höhere Dynamik in Folgeanlagen
- Kompakte und wartungsfreundliche Kabelführung
- Erste angeschlossene Testläufe bereits in KW 13