

Worum geht’s?
Für eine Spritzgussautomation mussten Kunststoffteile nach der Entnahme aus der Spritzgussmaschine einzeln übernommen und durch mehrere Prozessstationen transportiert werden. Als Transportsystem kam ein moversbasiertes System (SuperTrak) zum Einsatz. Die einzelnen Shuttles können dabei so positioniert werden, dass sie exakt den Kavitätenabständen der Spritzgussform entsprechen. Dadurch lassen sich die Teile direkt vereinzelt übernehmen und anschliessend einzeln weiterverarbeiten.
An einigen Stationen mussten die Produkte kurz vom Shuttle entnommen werden, um einen Prozessschritt auszuführen, und danach wieder eingesetzt werden. Hierfür wurde ein spezieller Parallelgreifer entwickelt, der ohne Energieversorgung auf dem Shuttle funktioniert.
Was war die Herausforderung?
- Keine pneumatische oder elektrische Energieversorgung auf dem Shuttle
- Sicherer Halt des Produkts während der Bewegung
- Gezieltes Öffnen nur an bestimmten Prozessstationen
- Freie Sicht auf das Produkt für Kameraprüfungen
- Reinraumtaugliches Design (ISO 5, Laminarflow von oben)
Wie wurde das gelöst?
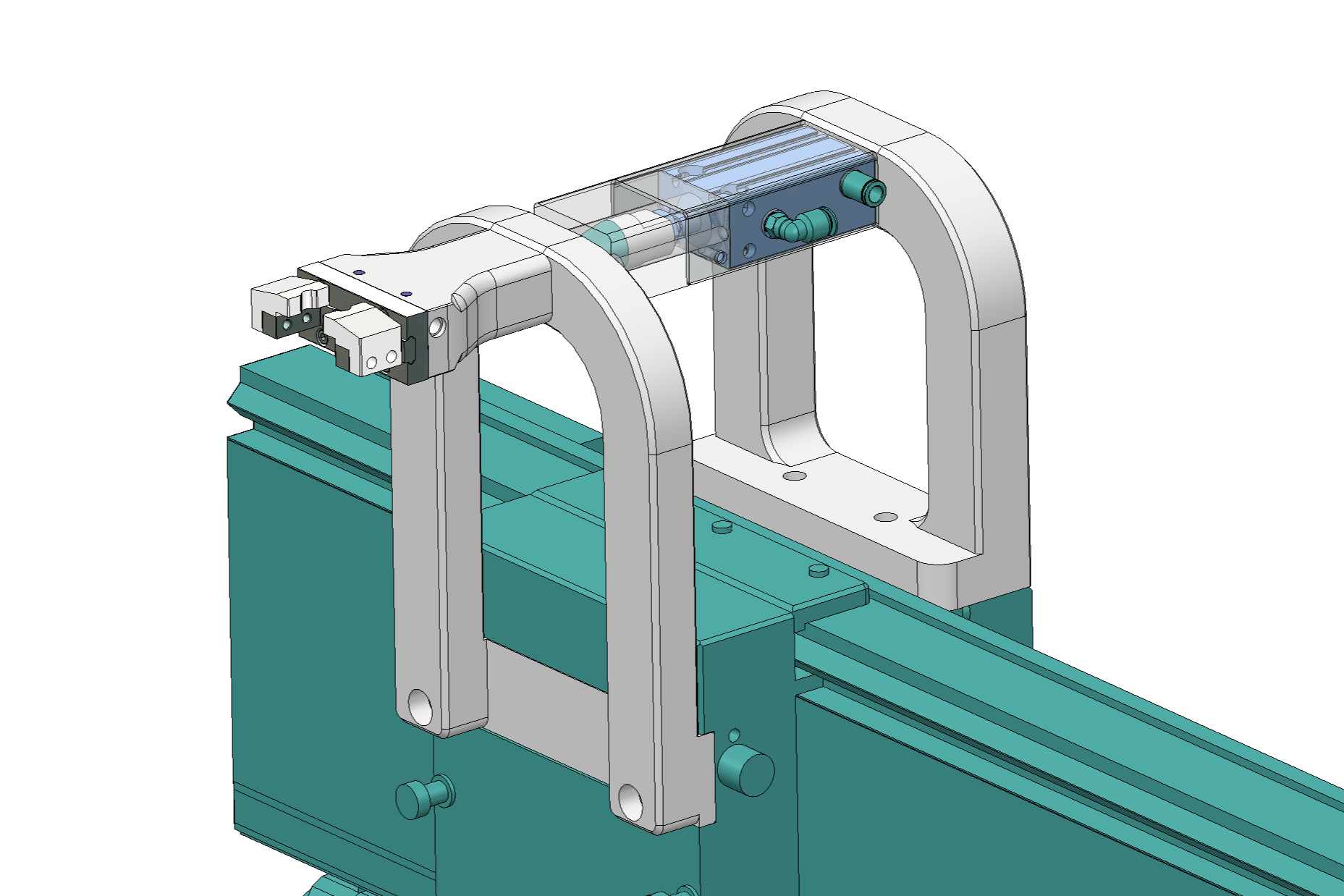
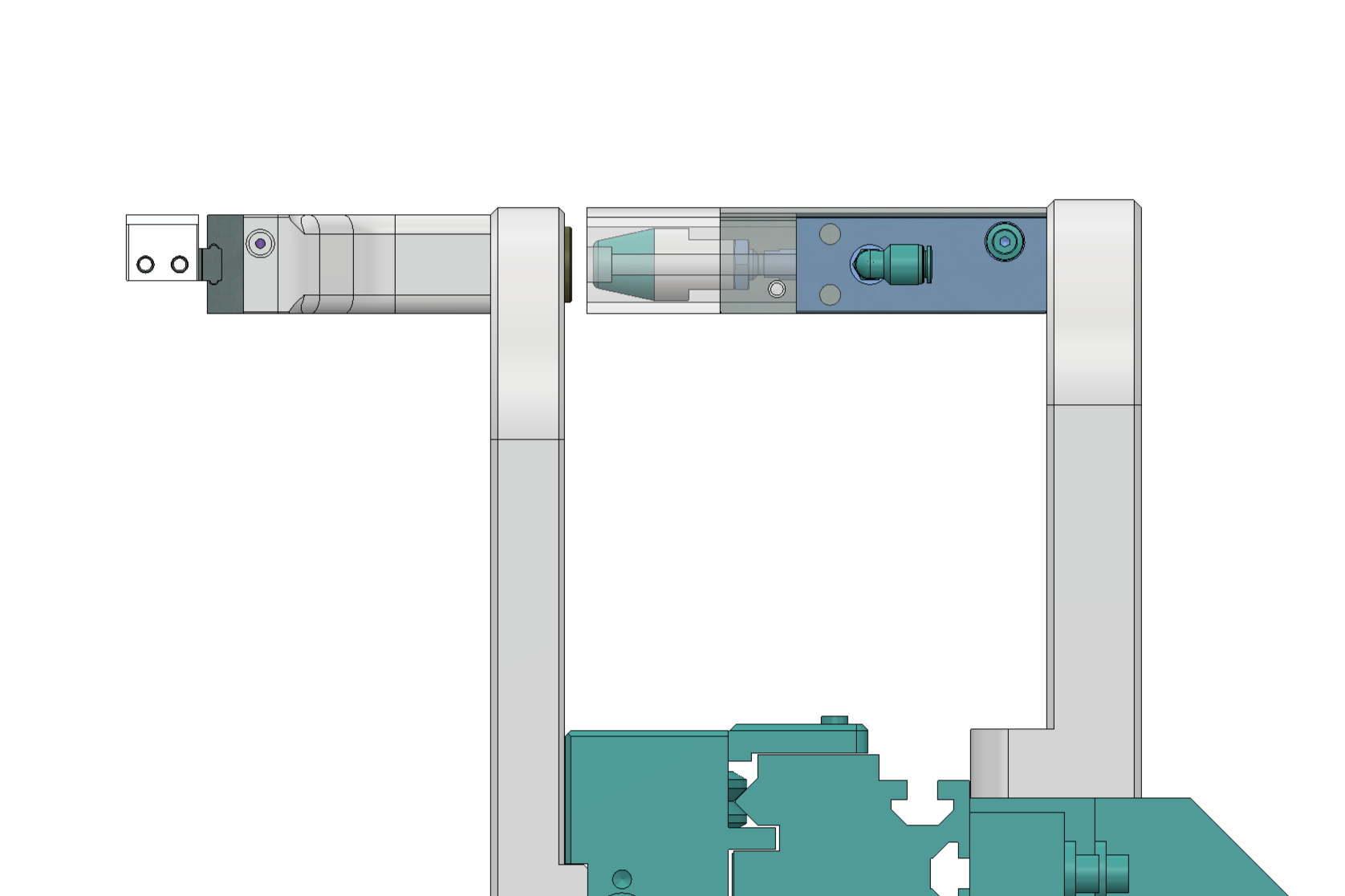
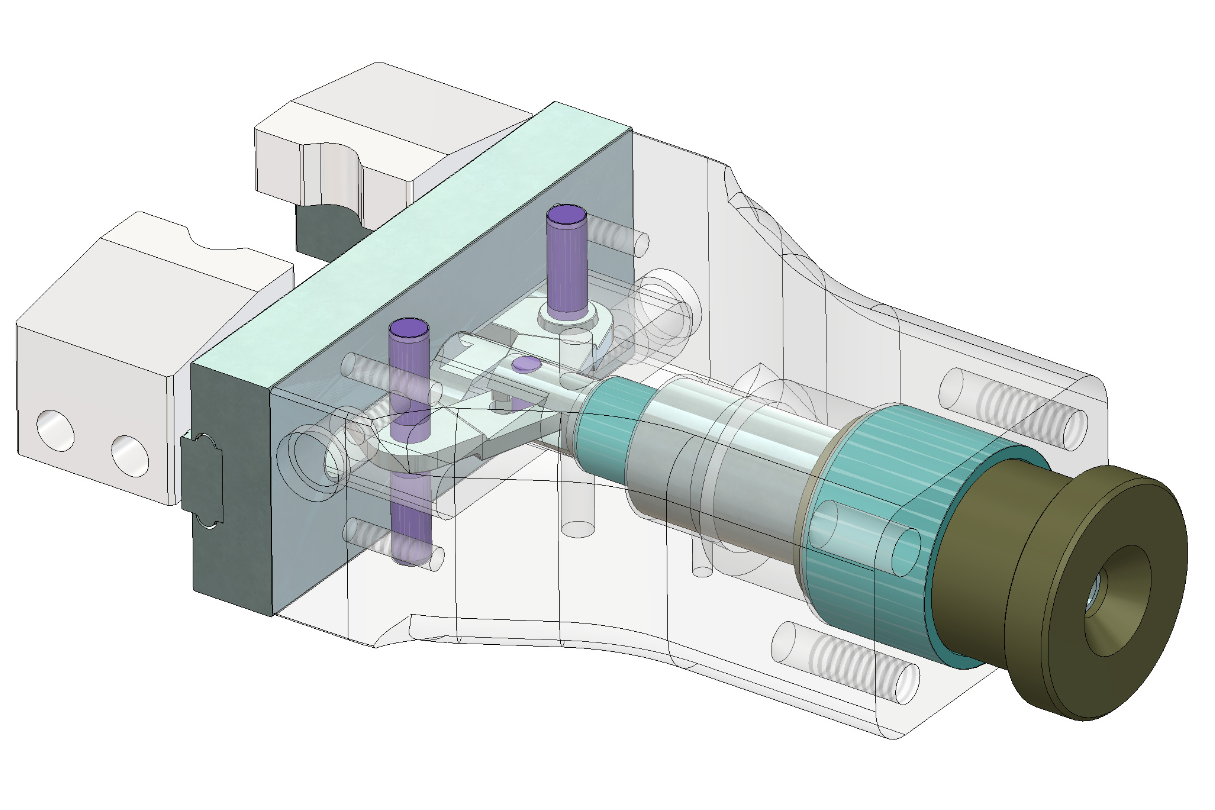
Der entwickelte Parallelgreifer schliesst über Federkraft und benötigt während der Fahrt keine externe Energieversorgung. Zum Öffnen besitzt der Greifer ein Druckstück, das an definierten Stationen durch einen stationären Pneumatikstössel betätigt wird. Dadurch öffnen die Greiferbacken und das Produkt kann entnommen oder wieder eingesetzt werden.
Die Greiferhalterung wurde über zwei Bügel oberhalb des Shuttles realisiert, sodass Kameras und Sensoren möglichst freie Sicht auf das Produkt haben. Gleichzeitig wurde der Greifer bewusst oberhalb der Shuttle-Führung positioniert, um Partikeleinflüsse aus dem Führungsbereich im Reinraum zu minimieren.
Die Greifmechanik basiert teilweise auf einem bestehenden Pneumatikgreifer. Die Betätigungsseite wurde jedoch vollständig neu konstruiert, um Feder, Lagerung und die stationäre Auslösung zu integrieren. Die Greifkraft kann über Distanzscheiben in vier Stufen angepasst werden, da zu Projektbeginn noch nicht klar war, welche Backenkraft für einen prozesssicheren Transport erforderlich ist.
Key Facts
- Parallelgreifer für moversbasiertes Transportsystem (SuperTrak)
- Fail-safe Greifen durch Federkraft
- Öffnung nur stationär über Pneumatikstössel
- Keine Energieversorgung auf dem Shuttle notwendig
- Vierstufig einstellbare Greifkraft
- Freie Produktsicht für Kamerakontrollen
- Reinraumgerechtes Design mit reduzierten Störkonturen
- Positionierung oberhalb der Shuttle-Führung zur Partikelreduktion