

Worum geht’s?
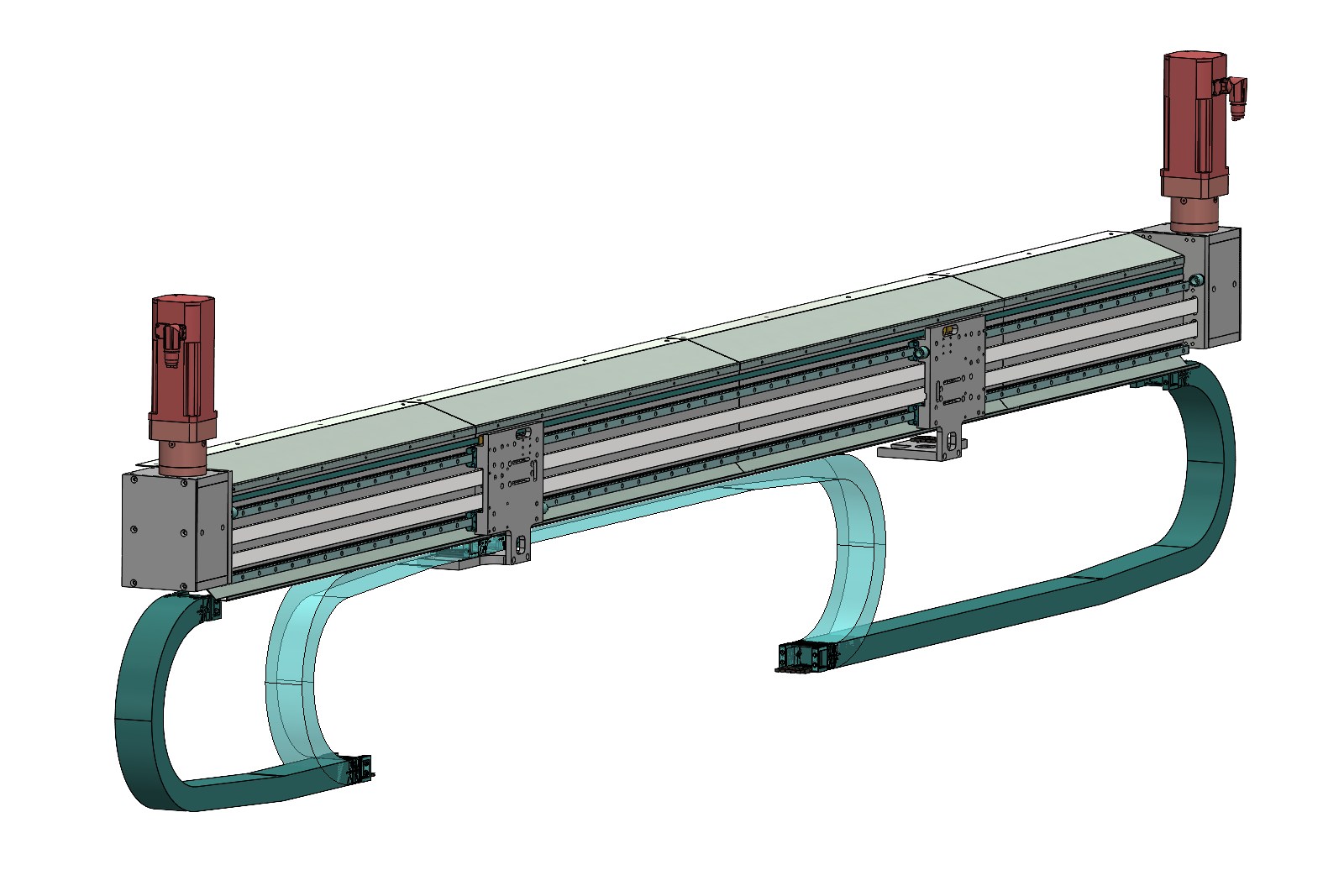
Diese Zahnriemenachse mit zwei Schlitten habe ich 2019 für ein Verpackungsmodul entwickelt. Zwei unterschiedliche Greifer mussten teilweise dieselben Positionen auf einer gemeinsamen Linie anfahren, gleichzeitig standen jedoch nur sehr enge Platzverhältnisse zur Verfügung. Daraus entstand die Idee, zwei Schlitten auf denselben Führungen zu bewegen – mit zwei separaten Zahnriemen und je einem Motor pro Achsende.
Ein Schlitten ist mit dem oberen, der andere mit dem unteren Riemen verbunden. Links wird beispielsweise der obere Riemen angetrieben und der untere umgelenkt, rechts entsprechend umgekehrt. So entsteht eine sehr kompakte Lösung mit zwei unabhängig bewegbaren Schlitten auf einer gemeinsamen Achse.
Was war die Herausforderung?
- Zwei Schlitten auf derselben Verfahrachse bei minimalem Bauraum
- Unabhängige Ansteuerung beider Schlitten ohne zusätzliche Verfahrebene
- Möglichst geringer Teileaufwand und hohe Wiederverwendbarkeit
- Einfache Verlängerbarkeit für unterschiedliche Anlagenlängen
- Sichere Positionsüberwachung beider Schlitten zur Kollisionsvermeidung
Eine mögliche Alternative wäre eine Linearmotorachse gewesen. Diese wäre jedoch deutlich teurer, energetisch aufwendiger und in der Ansteuerung komplexer gewesen. Auch Themen wie Energieführung, Sicherheit bei Stromausfall und Bremsverhalten spielen dort eine grössere Rolle. Für diese Anwendung war eine kompakte Zahnriemenlösung deshalb die sinnvollere Wahl.
Wie wurde das gelöst?
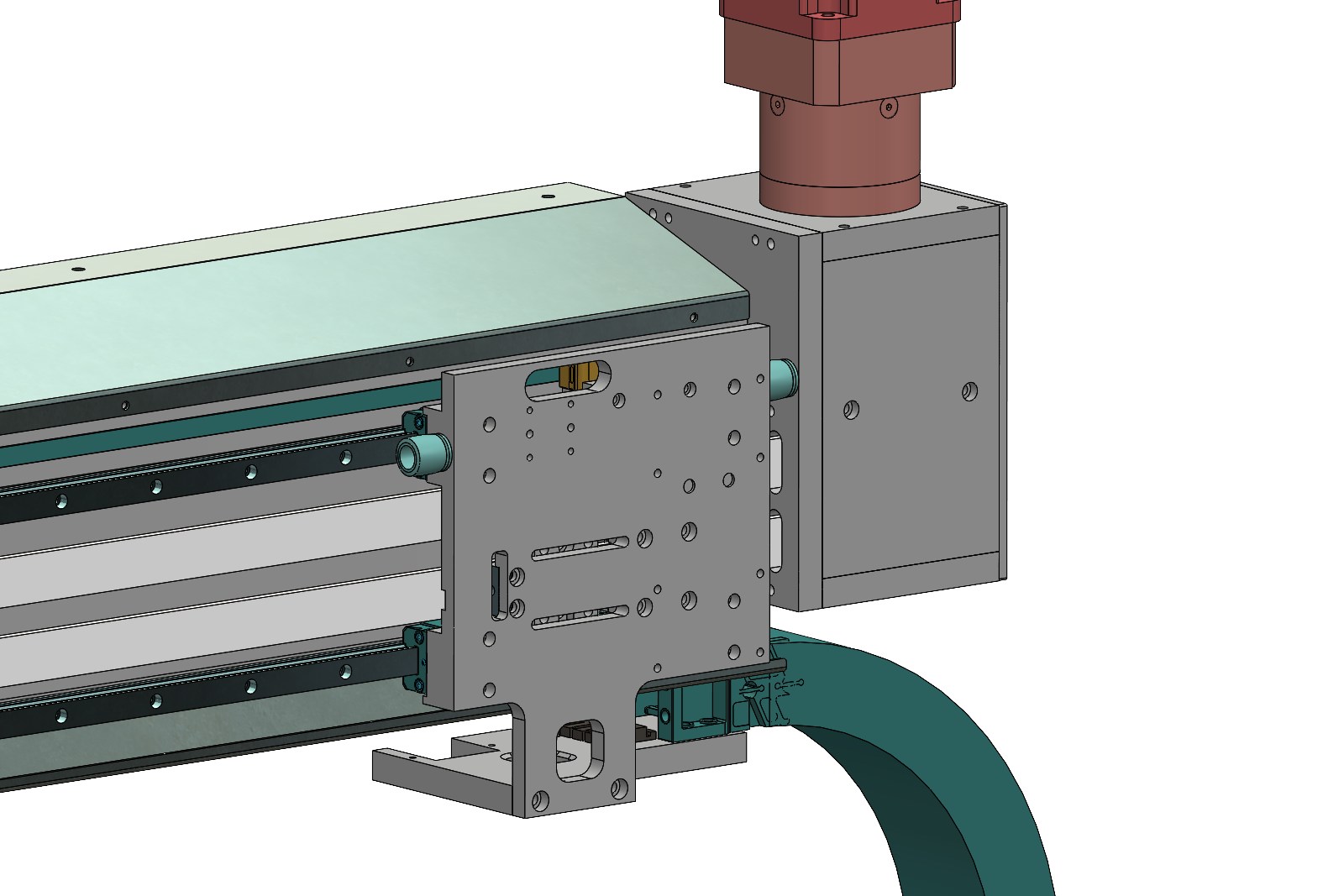
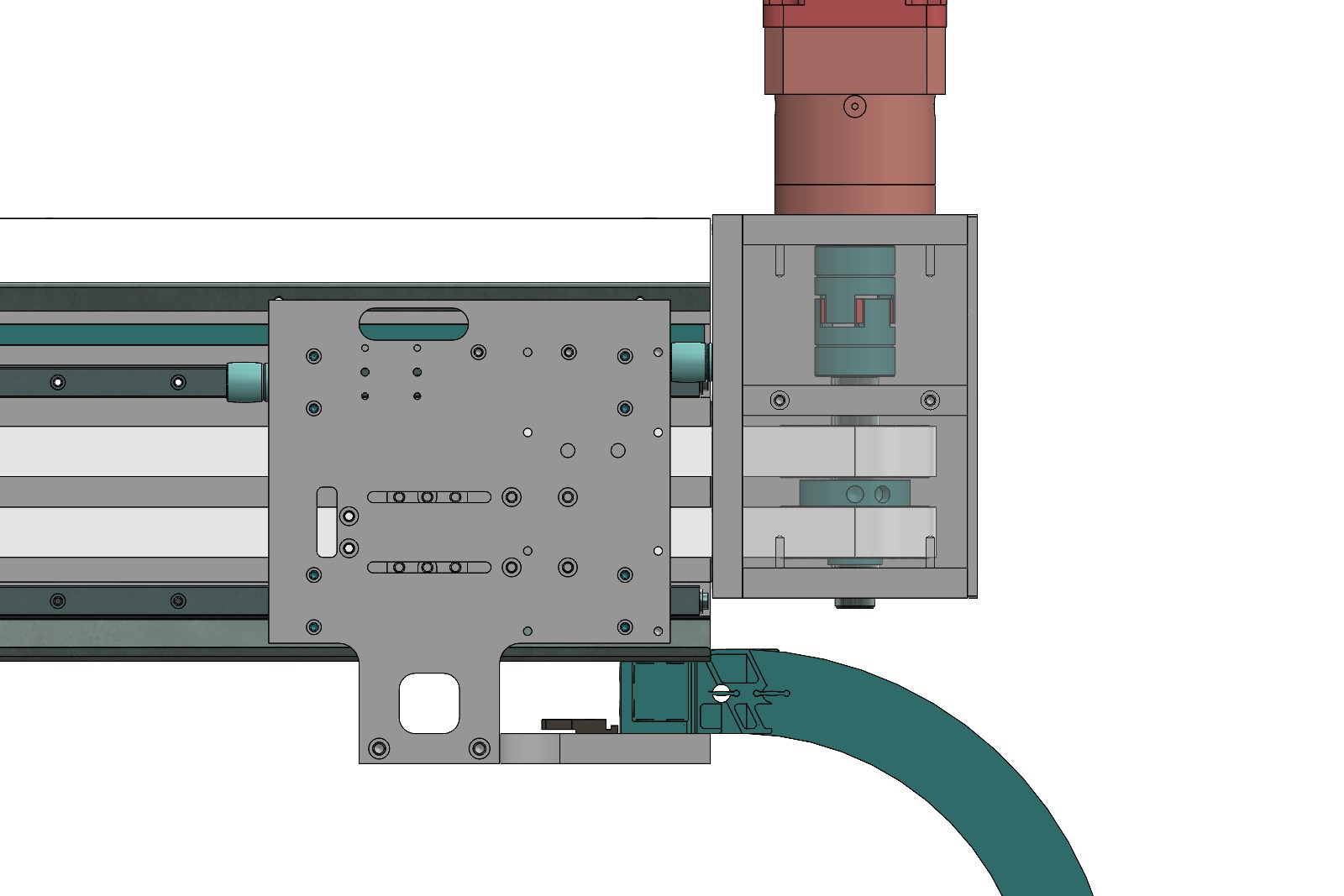
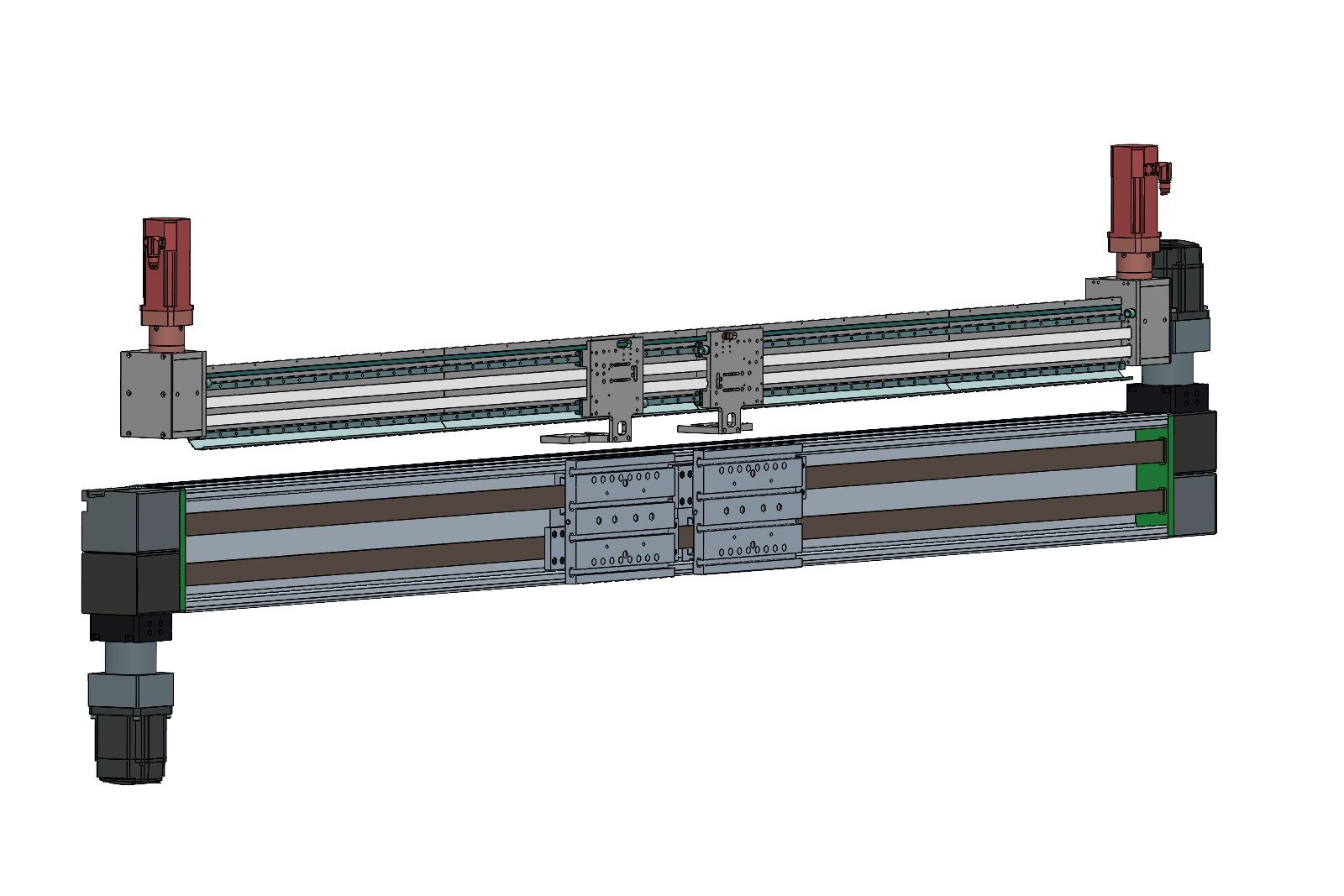
Die Achse basiert auf einem Aluminiumprofil, in dem die rücklaufende Riemenseite geführt wird. Aussen davor sitzt eine Platte mit den Führungen und den beiden Riemen für die Schlitten. Die Antriebseinheiten links und rechts sind fast identisch, ebenso die beiden Schlitten. Dadurch konnte die Anzahl unterschiedlicher Bauteile stark reduziert werden.
Die Antriebswelle trägt jeweils ein fixes Zahnriemenrad für den Antrieb sowie ein zweites, gelagertes Zahnriemenrad für die Umlenkung des anderen Riemens. Der Riemen wird direkt am Schlitten gespannt. Für die Wegmessung kann dasselbe Magnetband für beide Schlitten verwendet werden, sodass die Steuerung jederzeit die exakte Position beider Schlitten kennt und Kollisionen softwareseitig verhindert werden können.
Die Achse kann oberhalb oder unterhalb der Produktebene verbaut werden. Auf den Schlitten wird in der Regel ein Z-Hub mit Vakuumgreifer oder Parallelgreifer aufgebaut, teilweise zusätzlich mit Schwenkeinheit. Das Konzept ist sehr leicht skalierbar und wurde inzwischen in über 20 Anlagen eingesetzt.
Besonders wichtig war die kompakte Bauweise: Die Achse benötigt extrem wenig Teile, lässt sich einfach verlängern und erlaubt ein deutlich engeres Zusammenfahren der Schlitten als vergleichbare Marktvarianten. Gleichzeitig bleibt die Bauhöhe und Baubreite sehr gering, was sie für enge Module besonders attraktiv macht.
Key Facts
- Zwei unabhängig verfahrbare Schlitten auf gemeinsamer Zahnriemenachse
- Je ein Motor pro Achsende
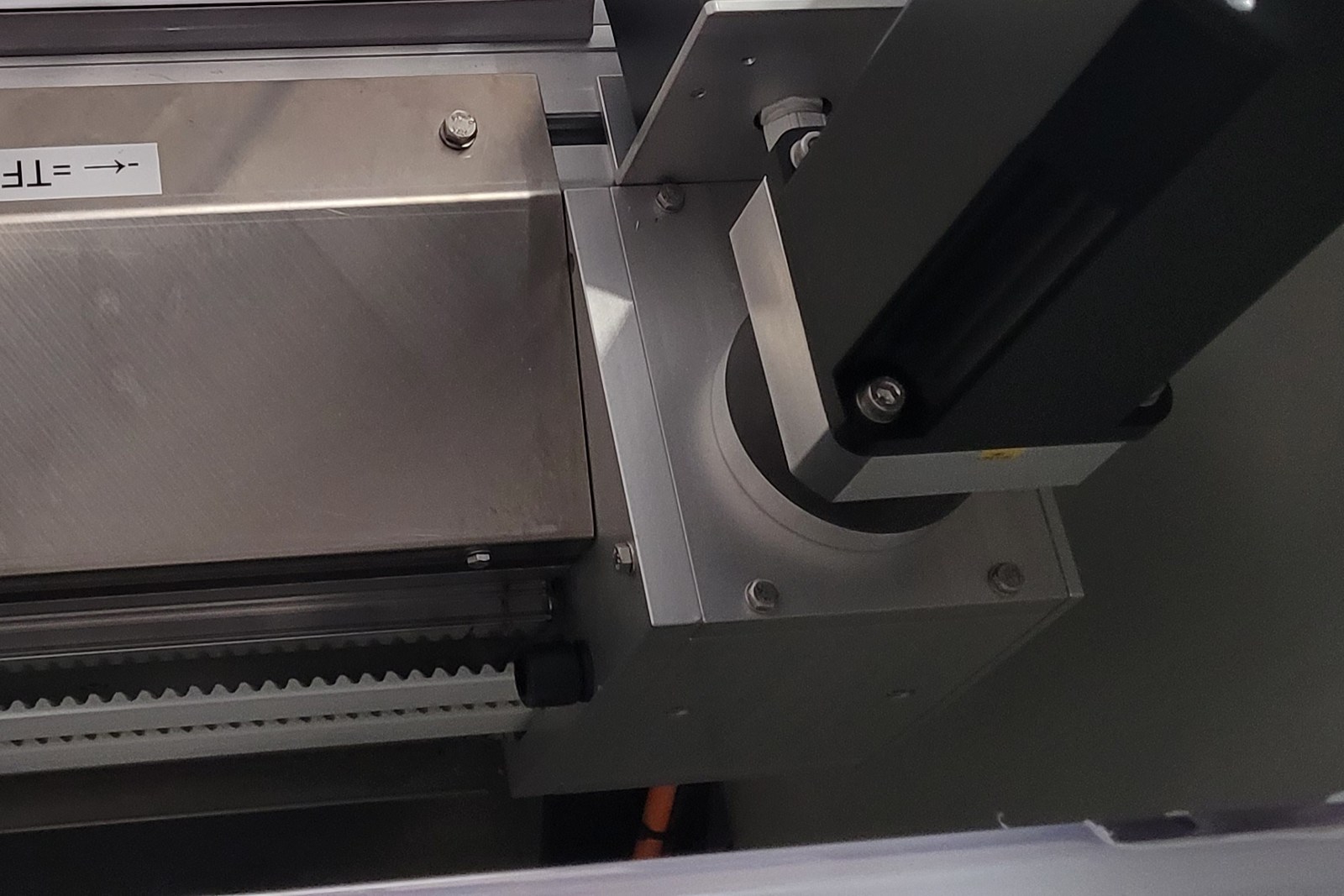
- Zwei separate 25er Zahnriemen
- Riemenspannung direkt am Schlitten
- Nahezu identische Antriebseinheiten und Schlitten
- Gemeinsames Magnetband für beide Schlitten
- Softwareseitige Kollisionsvermeidung durch genaue Positionskenntnis
- Ober- oder unterhalb der Produktebene einsetzbar
- Einfach verlängerbar für unterschiedliche Anlagenlängen
- Typischer Aufbau mit Z-Hub, Vakuumgreifer oder Parallelgreifer
- Bereits in über 20 Anlagen eingesetzt
- Sehr kompakte Eigenentwicklung mit geringem Teileaufwand