
Worum geht’s?
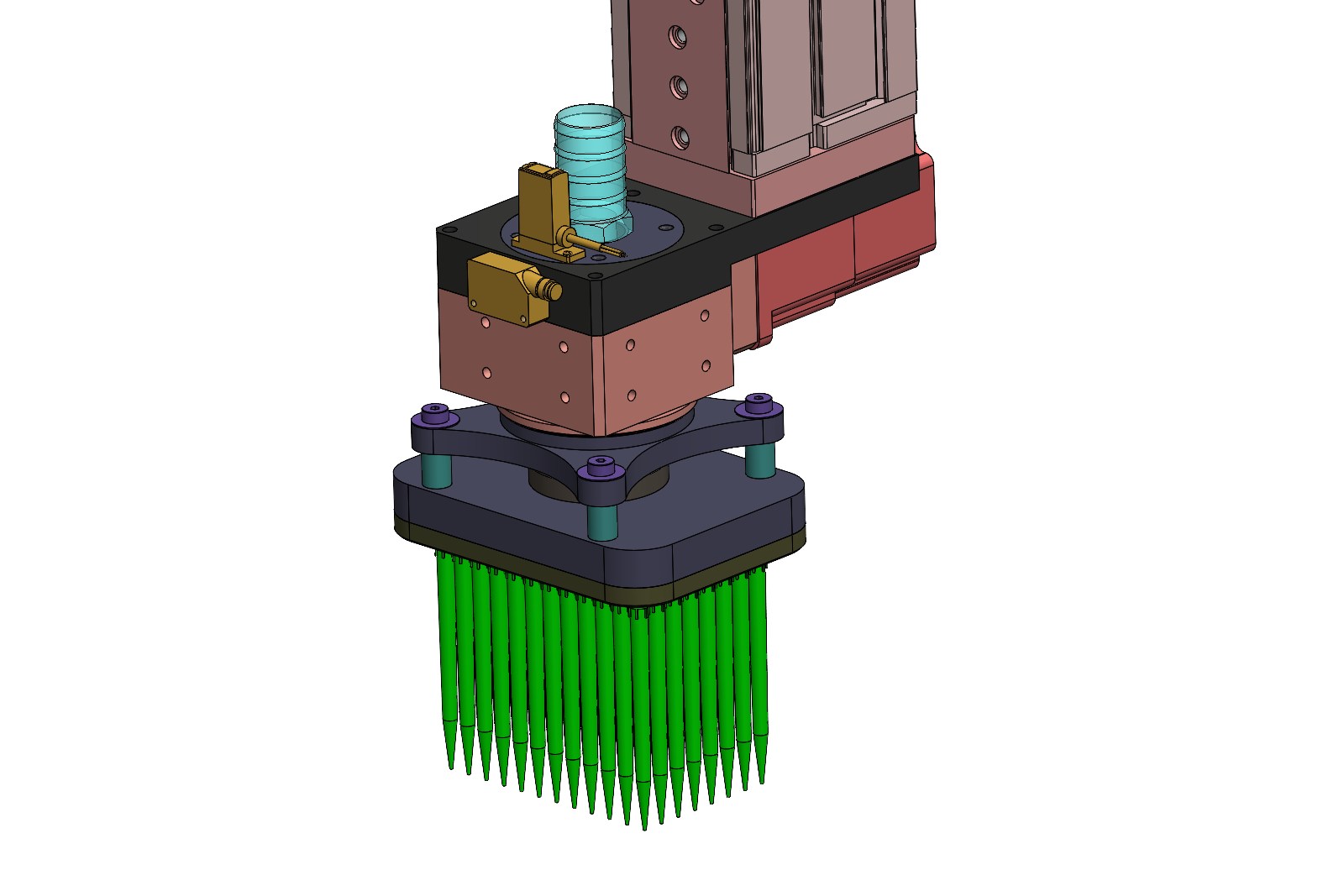
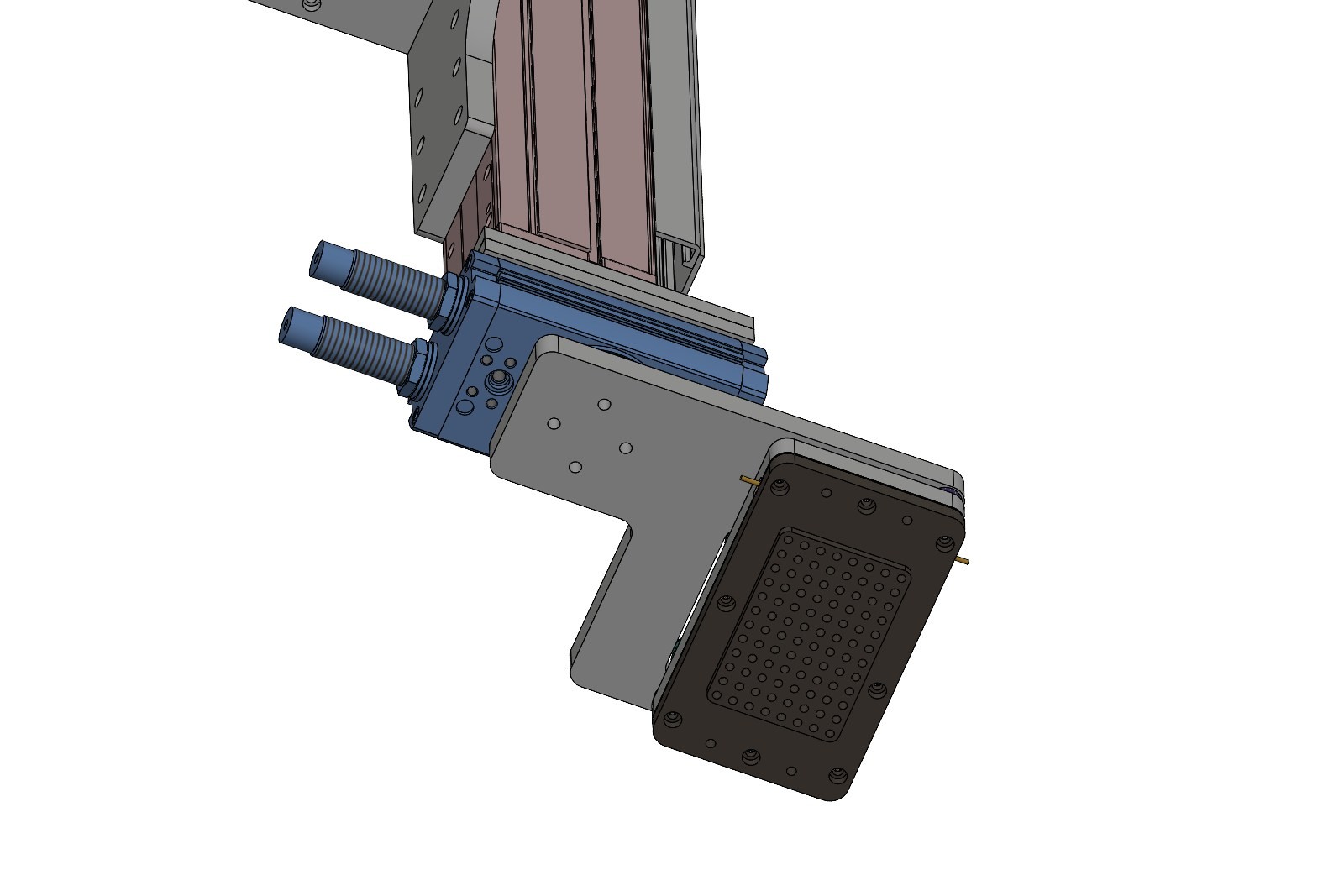
Die aus der Spritzgussmaschine entnommenen Pipettenspitzen werden in 96er Lochbilder abgefüllt und anschliessend komplett in das nächste Modul umgesetzt. Dafür wird ein Vakuumgreifer eingesetzt, der alle 96 Spitzen gleichzeitig aufnehmen kann. Die besondere Anforderung bestand darin, dass nicht nur vollständige 96er Bilder, sondern auch angefangene oder teilweise leere Bilder sicher gehandhabt werden müssen.
Bisher war genau das ein Schwachpunkt: Sobald nicht alle 96 Positionen belegt waren, zog der Greifer zu viel Leckluft und konnte das Bild nicht mehr zuverlässig übernehmen. Es wurden dafür bereits verschiedene, teilweise aufwendige Konzepte untersucht. Die schliesslich umgesetzte Lösung basiert jedoch auf einem deutlich einfacheren und robusteren Vakuumprinzip.
Was war die Herausforderung?
- Sicheres Ansaugen von vollständigen und unvollständigen 96er Bildern
- Hoher Gesamtleckstrom durch die kleinen Öffnungen an den Pipettenspitzen
- Kurze Taktzeiten mit unter 8 s pro Bild
- Drehbarkeit des Bildes für nachfolgende Stationen
- Verbesserung von Z-Hub, Schlauchführung und Verschleissverhalten
Jede einzelne Pipettenspitze besitzt vorne eine kleine Öffnung und erzeugt dadurch einen Vakuumverlust. Bei 96 Spitzen summiert sich diese Leckfläche stark. Zusätzlich musste die Saugeinheit leicht federnd auf die Spitzen aufsetzen können, ohne sich bei anliegendem Vakuum selbst hochzuziehen.
Wie wurde das gelöst?
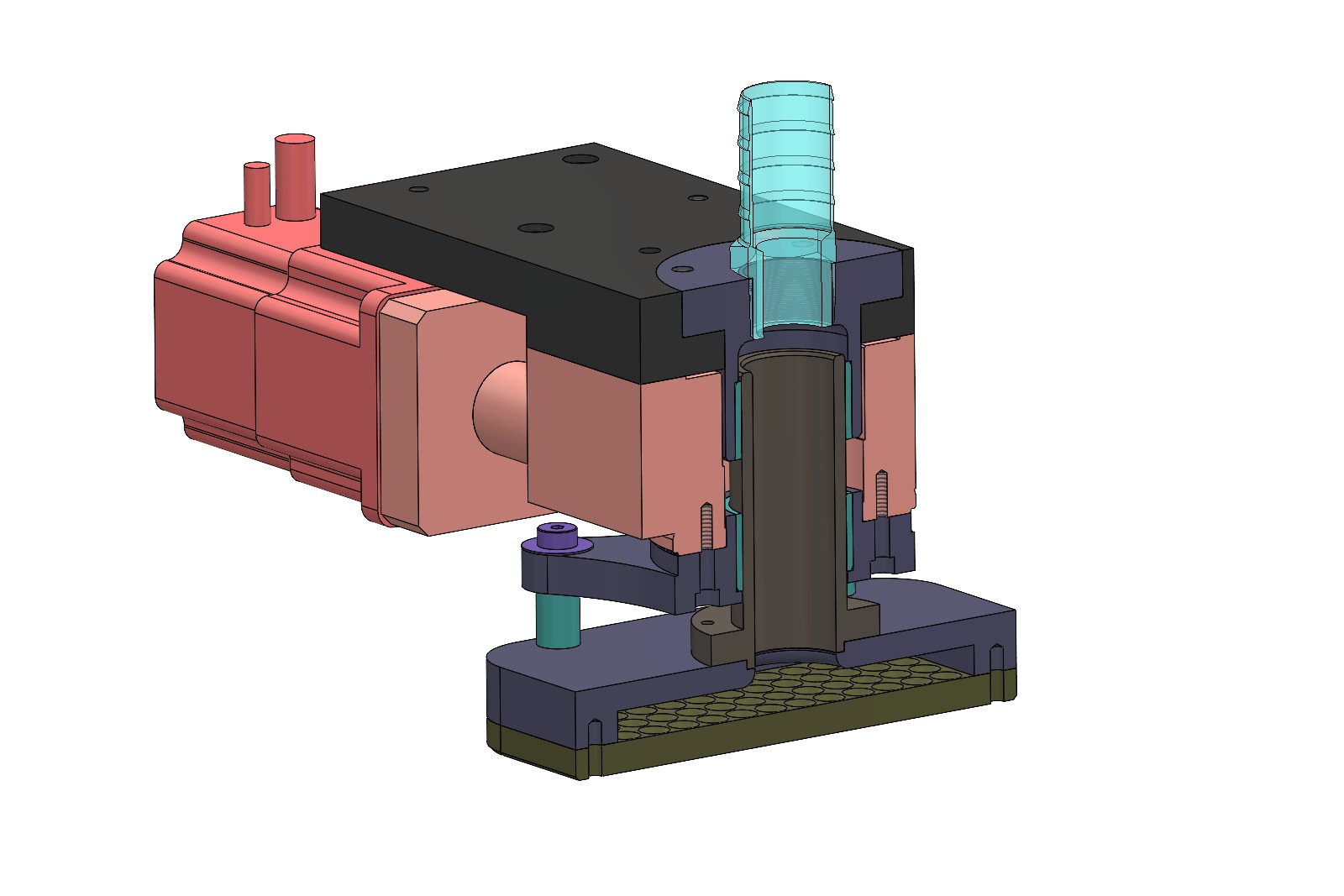
Die entscheidende Verbesserung lag in der Dimensionierung der Ansaugbohrungen. Diese wurden nicht unnötig gross ausgeführt, sondern nur so weit, dass sie etwas mehr Luft absaugen als durch die Spitzenöffnungen nachströmen kann. Dadurch entsteht in jeder Pipettenspitze ein ausreichender Unterdruck, um sie zuverlässig an die Saugplatte zu ziehen. Gleichzeitig wurde der Schlauchquerschnitt so gewählt, dass genügend Durchfluss zur Verfügung steht, und das Ventil möglichst nahe am Greifer positioniert.
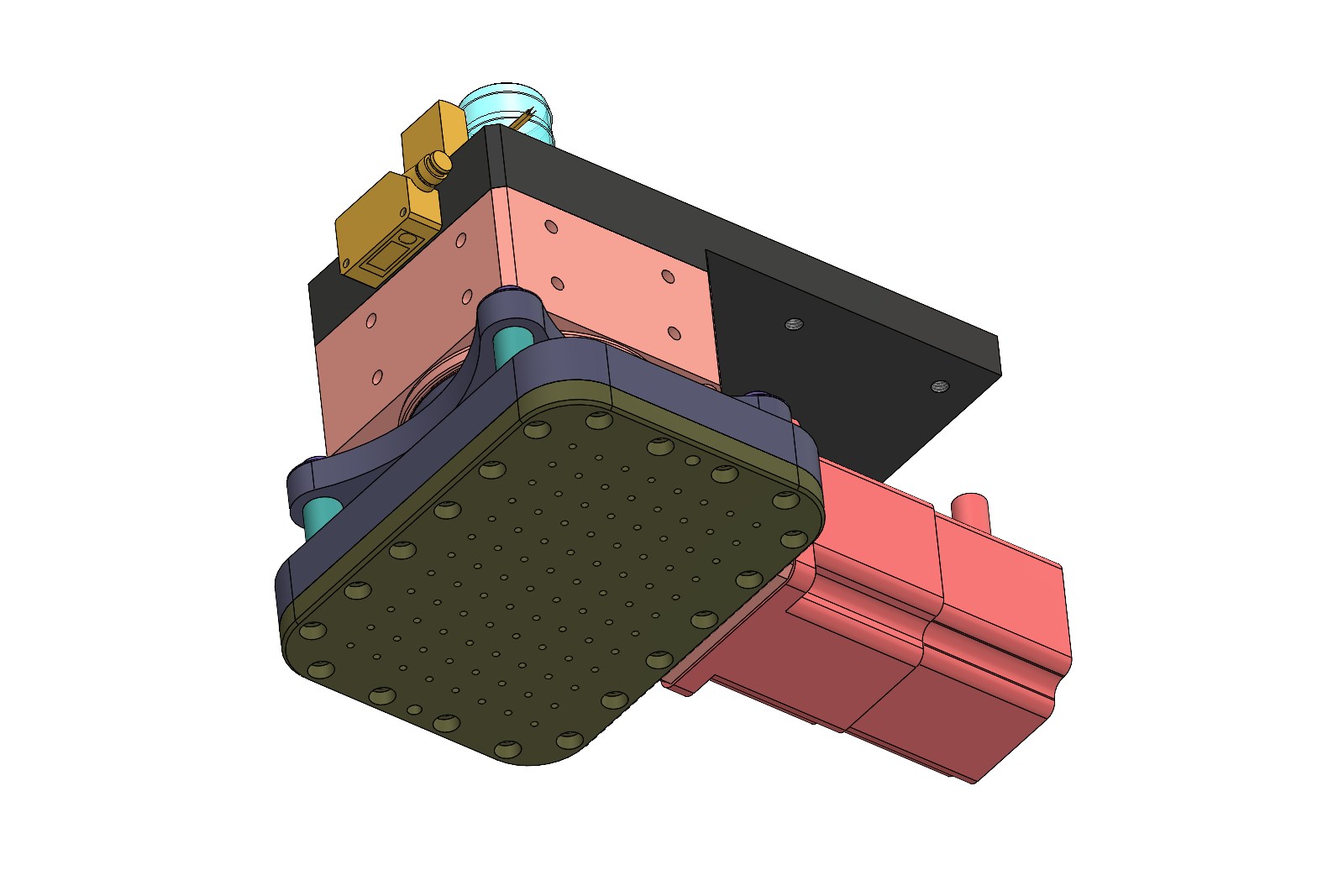
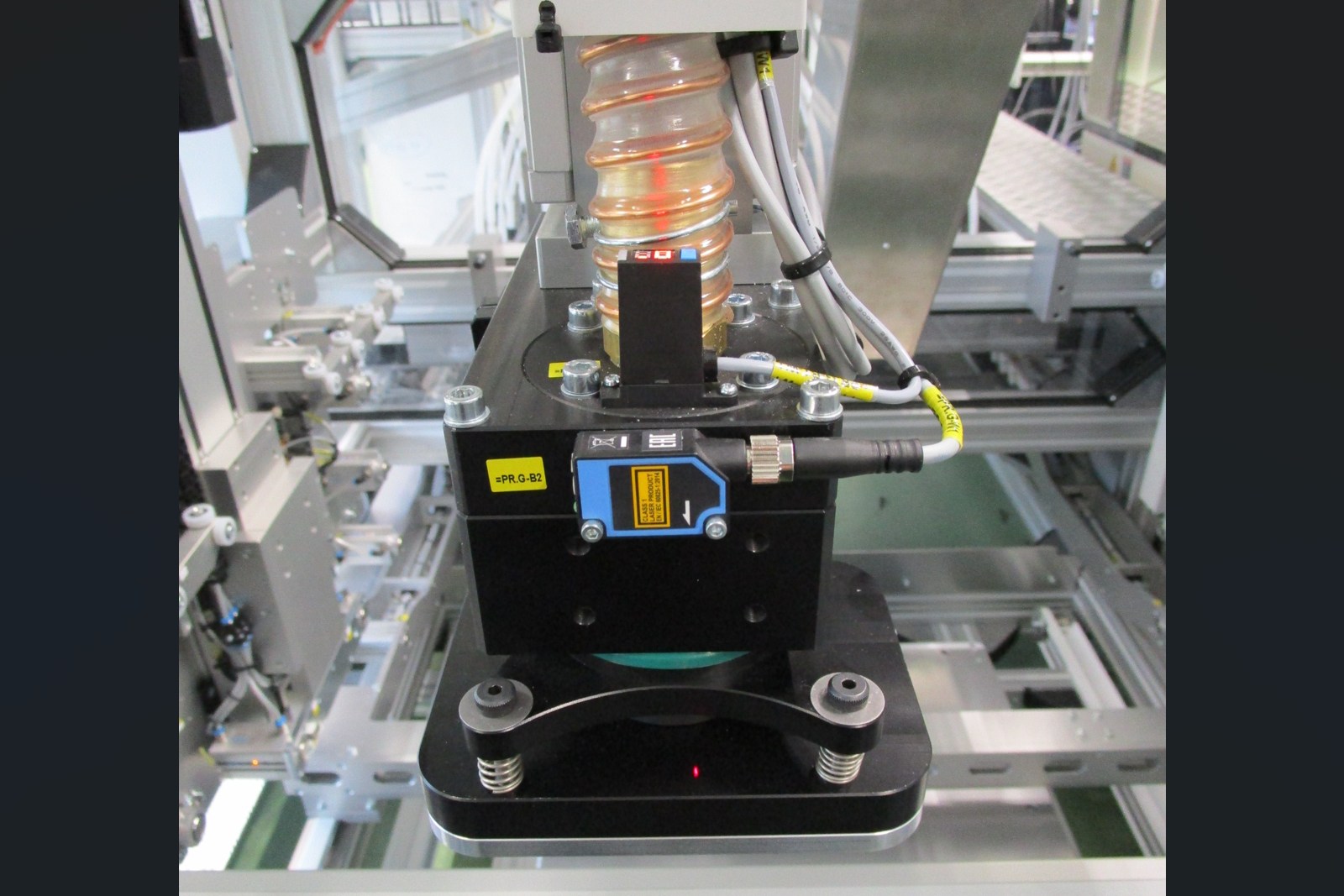
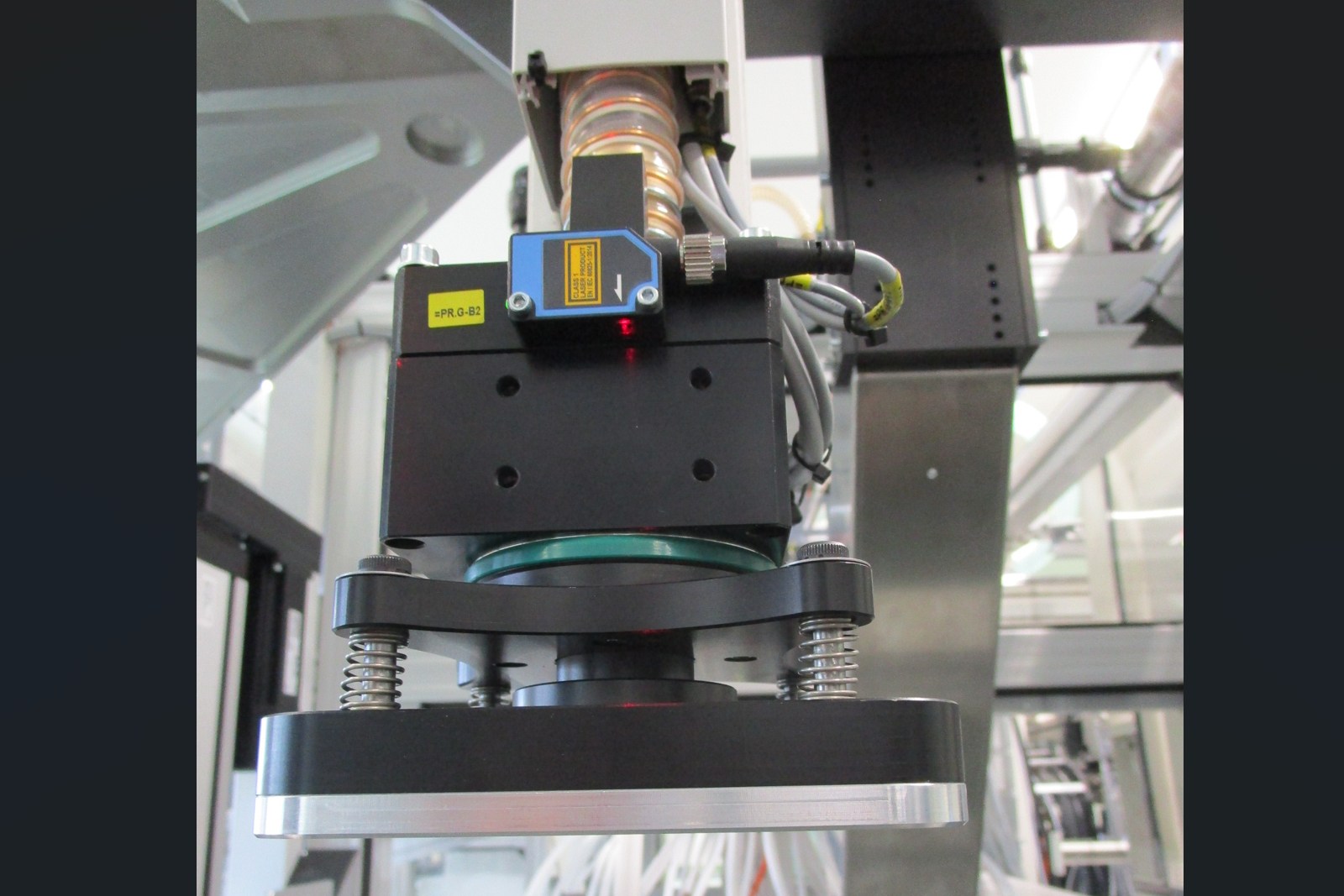
Die Saugeinheit ist gefedert gelagert und über Gleitlager vom Schlauch entkoppelt. So kann die Platte mit leichtem Druck auf die 96 Spitzen aufsetzen und diese sauber übernehmen. Die Federkraft wurde so gewählt, dass sie grösser ist als die Kraft, mit der sich die Platte bei geschlossenem Vakuum nach oben ziehen würde.
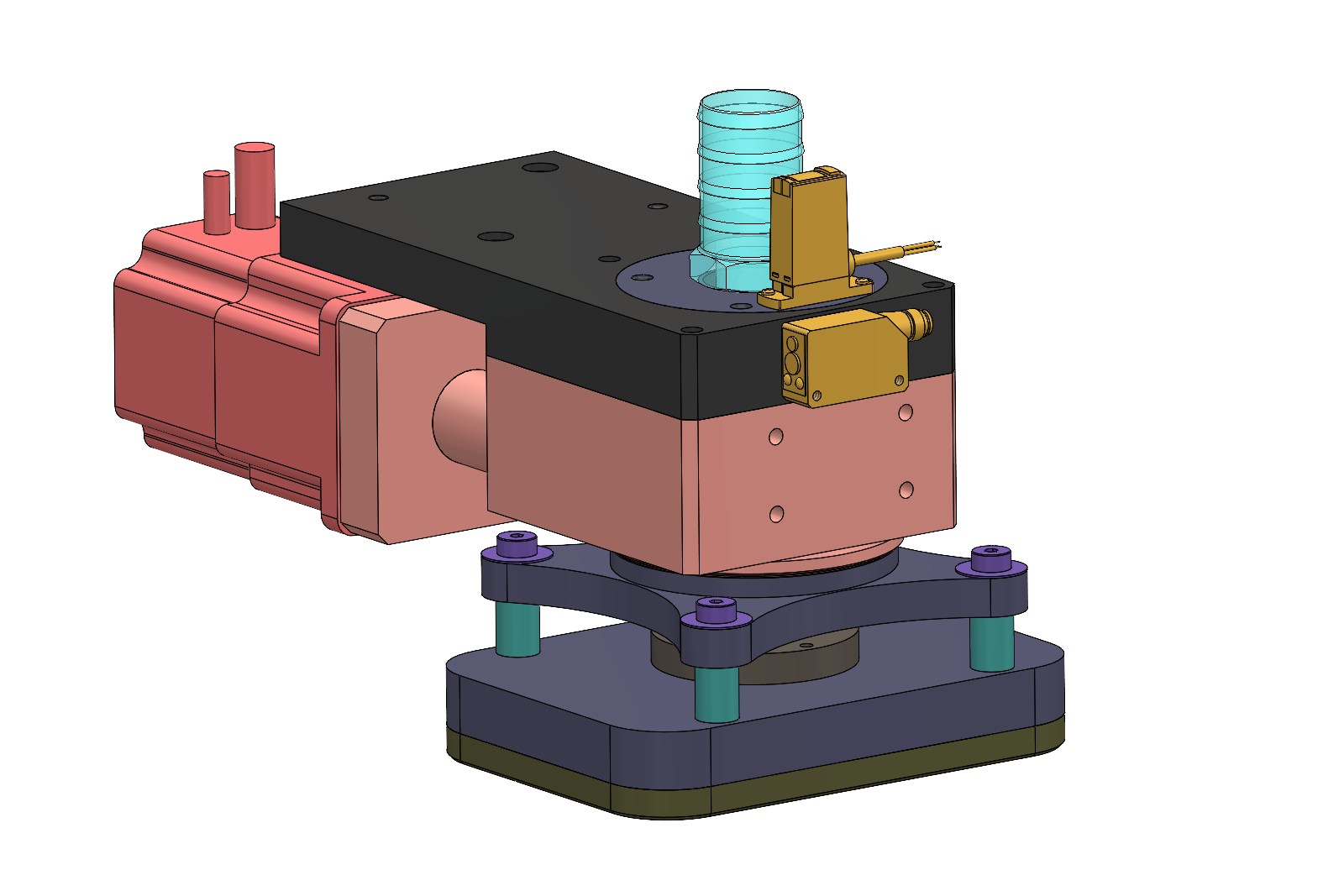
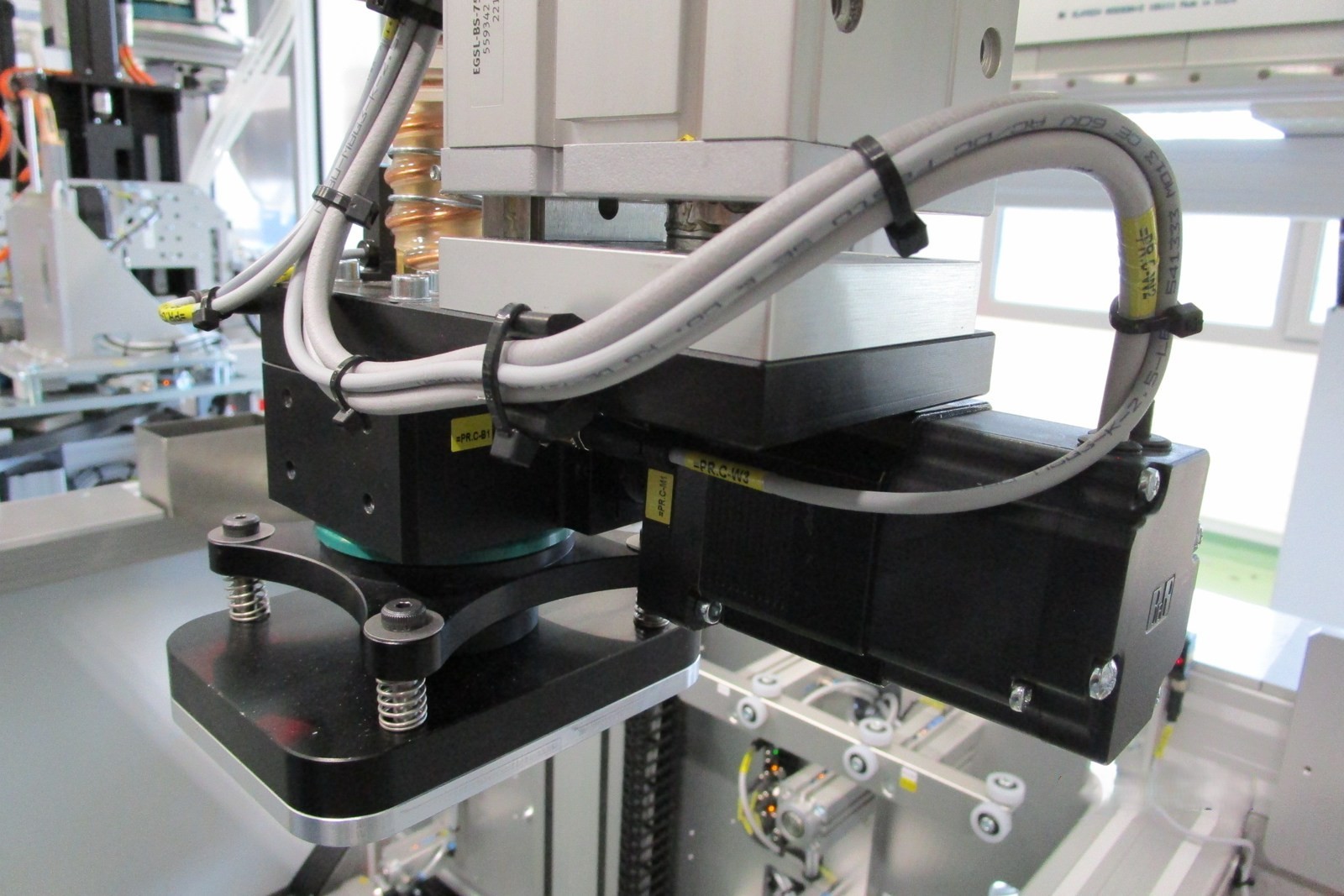
Zusätzlich wurde ein Miniatur-Rundtisch mit grossem zentralem Durchlass integriert, damit der Vakuumstrom trotz Drehfunktion möglichst wenig beeinflusst wird. Damit können 96er Bilder je nach Prozess um 90° gedreht oder im Winkel leicht korrigiert eingesetzt werden. Die frühere pneumatische Drehbewegung wurde durch einen Schrittmotor ersetzt, was deutlich mehr Flexibilität bei Positionierung und Ablauf bringt. Ein Lasersensor überwacht zusätzlich die Position der Federplatte.
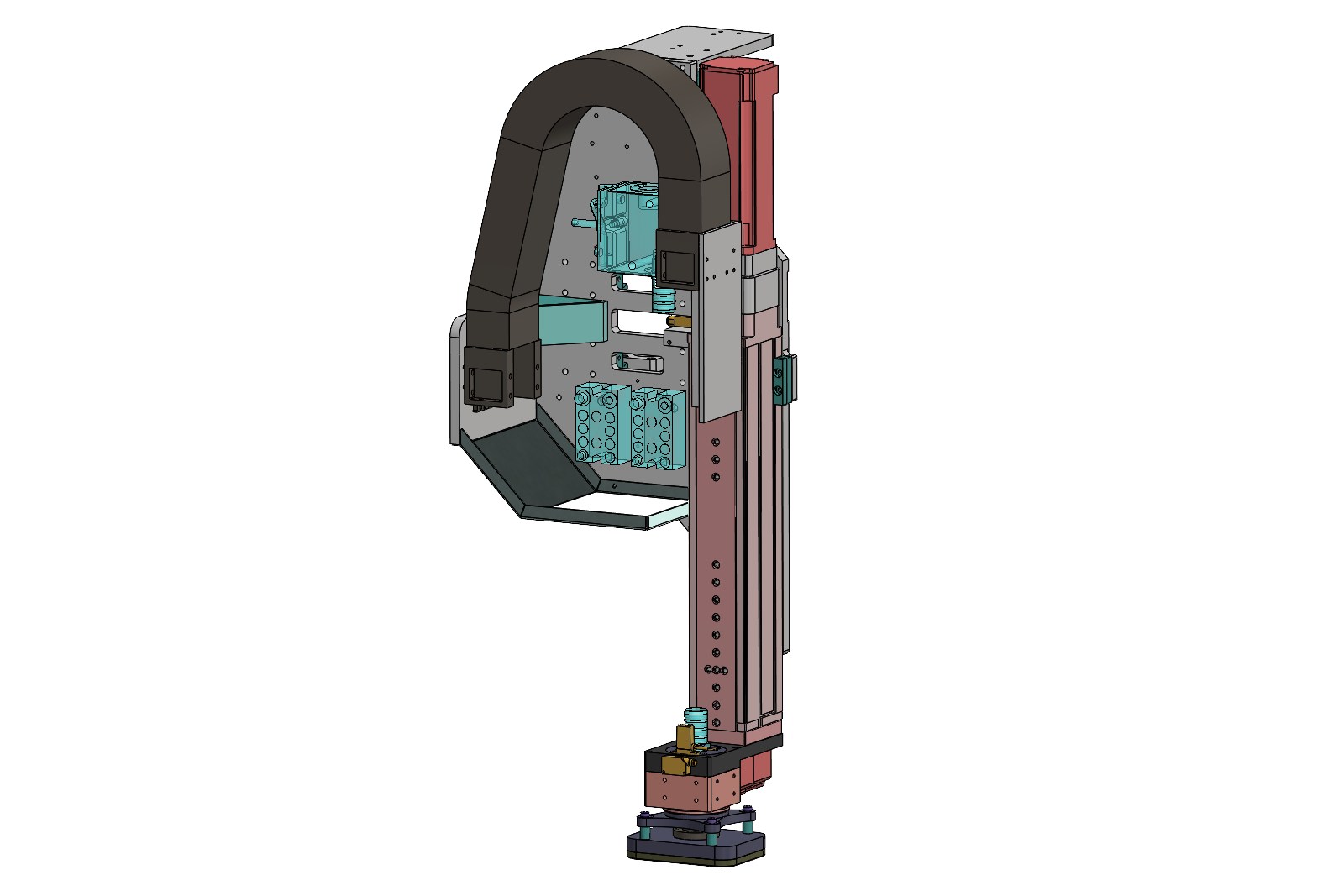
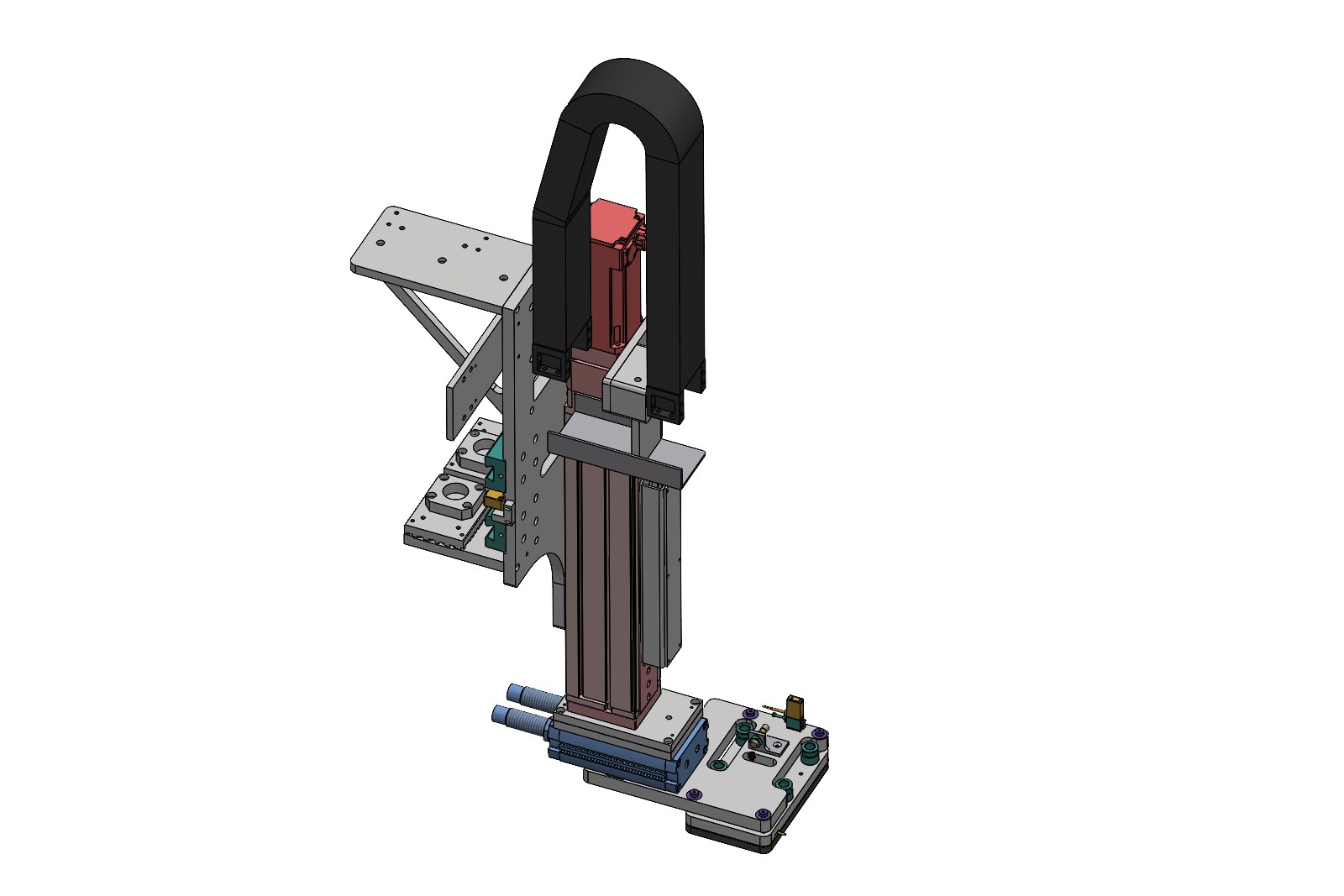
Im Zuge des Projekts wurde auch der gesamte Z-Hub überarbeitet: mit besser geeignetem Vakuumschlauch, grösserem Energiekettenradius, integrierter Abriebauffangung, sauber eingebauten I/O-Modulen sowie besser zugänglicher Wegmessung. Dadurch wurde nicht nur der Greifer, sondern die gesamte Handhabungseinheit konstruktiv verbessert.
Key Facts
- Vakuumgreifer zum Umsetzen von 96 Pipettenspitzen gleichzeitig
- Auch für unvollständige oder angefangene 96er Bilder geeignet
- Optimierte Ansaugbohrungen statt komplexer Abdichtmechanismen
- Gefederte Ansaugplatte für sauberes Aufsetzen
- Saugeinheit über Gleitlager vom Schlauch entkoppelt
- Miniatur-Rundtisch mit grossem zentralem Durchlass
- Schrittmotor statt pneumatischer Drehbewegung
- Lasersensor zur Überwachung der Federplattenposition
- Überarbeiteter Z-Hub mit verbesserter Energiekette und Schlauchführung
- Ventil nahe am Greifer und reduzierte Abrieberzeugung